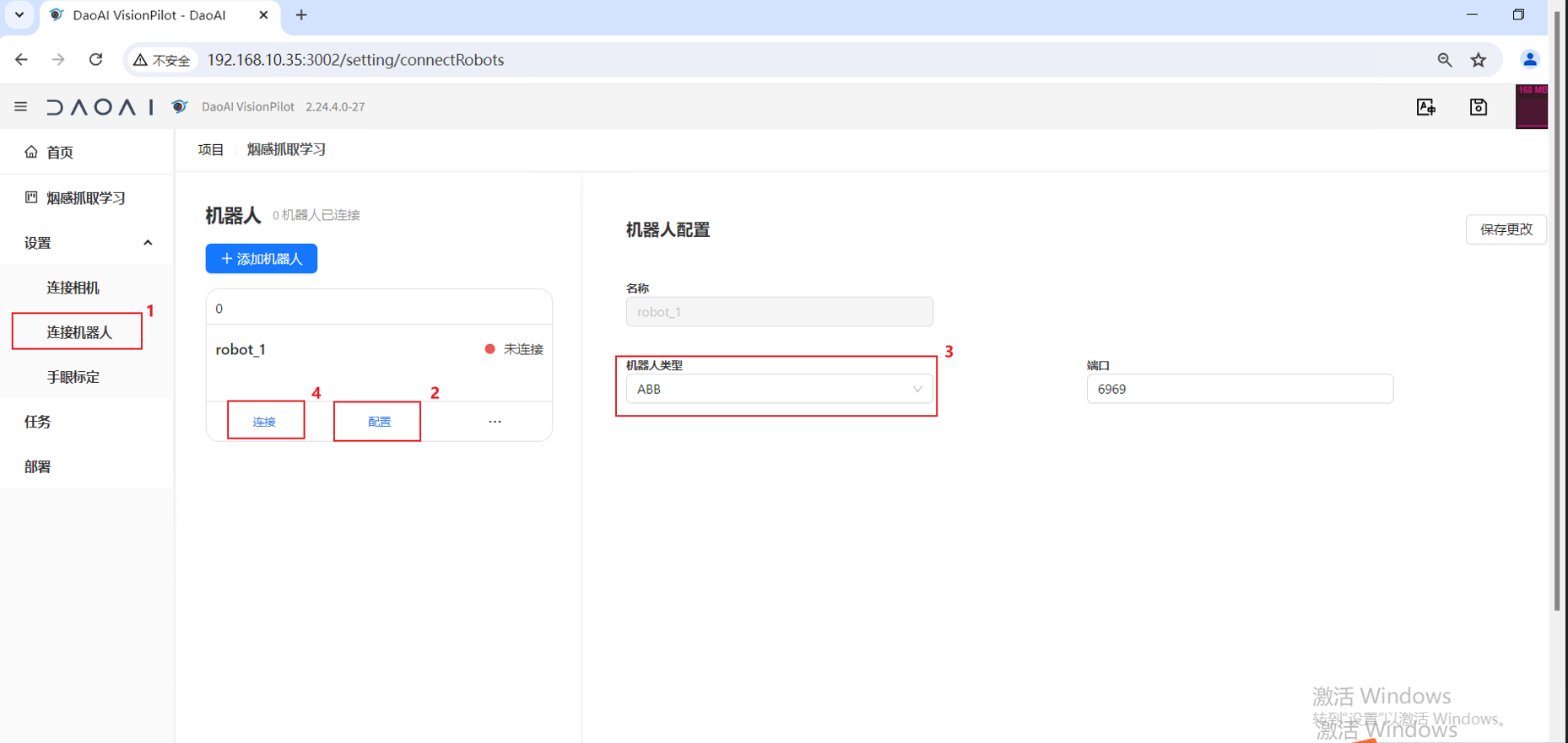
通讯设置并建立连接、测试
使用 ABB 机器人需完成5个步骤:
程序下载
下载 ABB机器人脚本
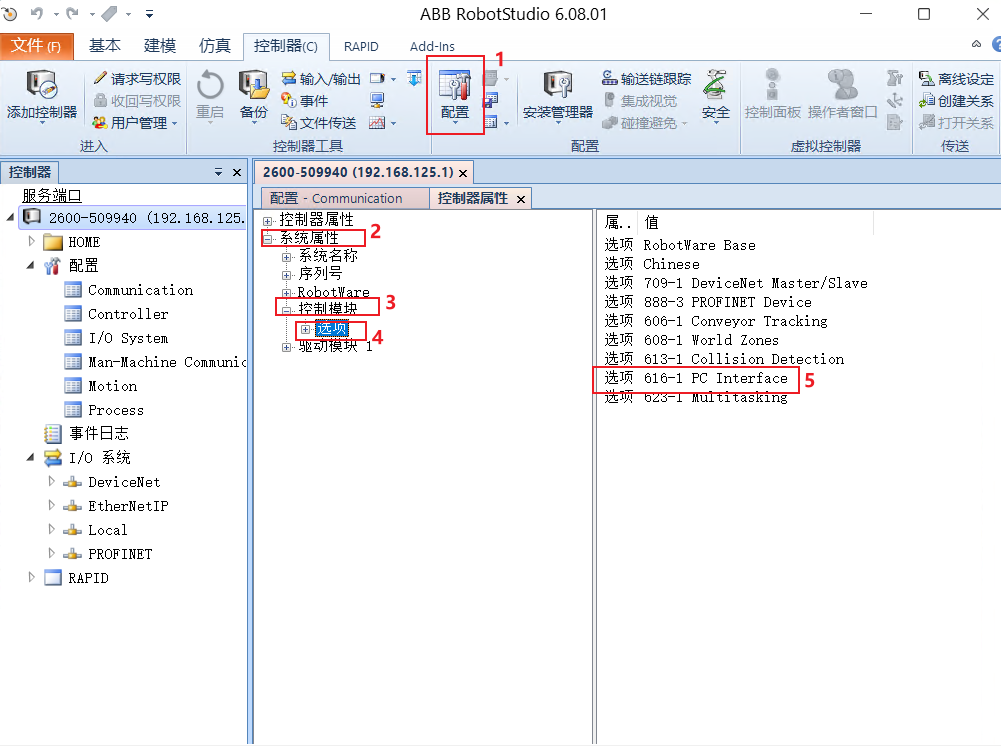
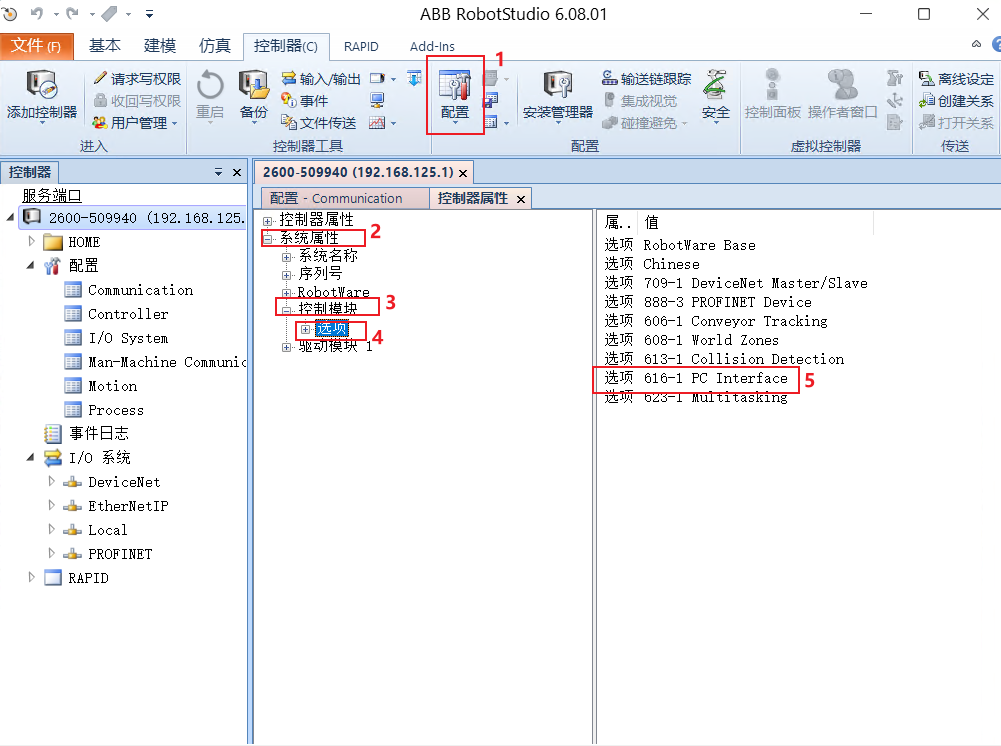
检查机器人控制器选型包
DaoAI Vision Pickit 与 ABB机器人通讯,需要安装以下控制器模块:
616 PC interface(套接字消息)
设置网络连接
关于机器人与DaoAI Vision pilot软件之间的通讯IP设置如下:
机器人控制柜IP需与机器人脚本中IP和工控机网口IP设置在同一网端内。
工控机网口需与机器人脚本中所写入的IP一样。
误区:莫认为能ping上就是正常通讯(工控机需关闭防火墙设置)
硬件连接
DaoAI Vision pilot和机器人控制器通过以太网连接。 以太网电缆应连接到机器人控制器的 WAN 端口,并连接到工控机、将网口地址更改为:"192.168.220.10"
机器人控制柜IP配置
打开 RobotStudio 并按照以下步骤操作:将IP更改为:"192.168.220.XX"网段内。
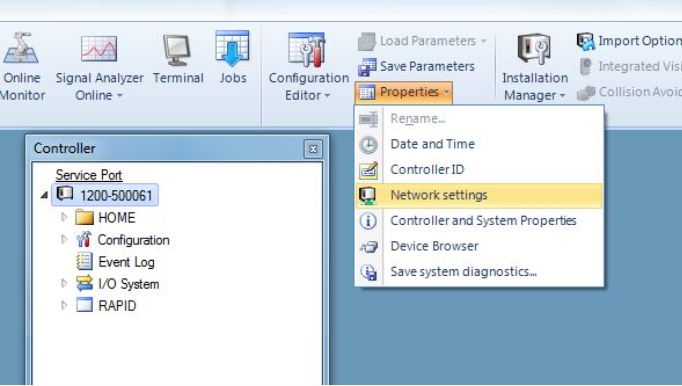
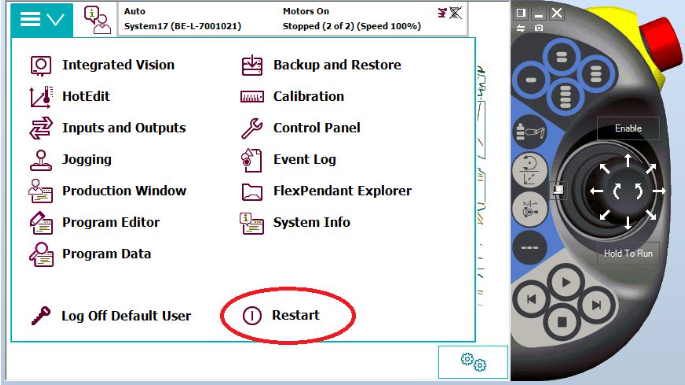
完成上述步骤后,从手动示教器重新启动。
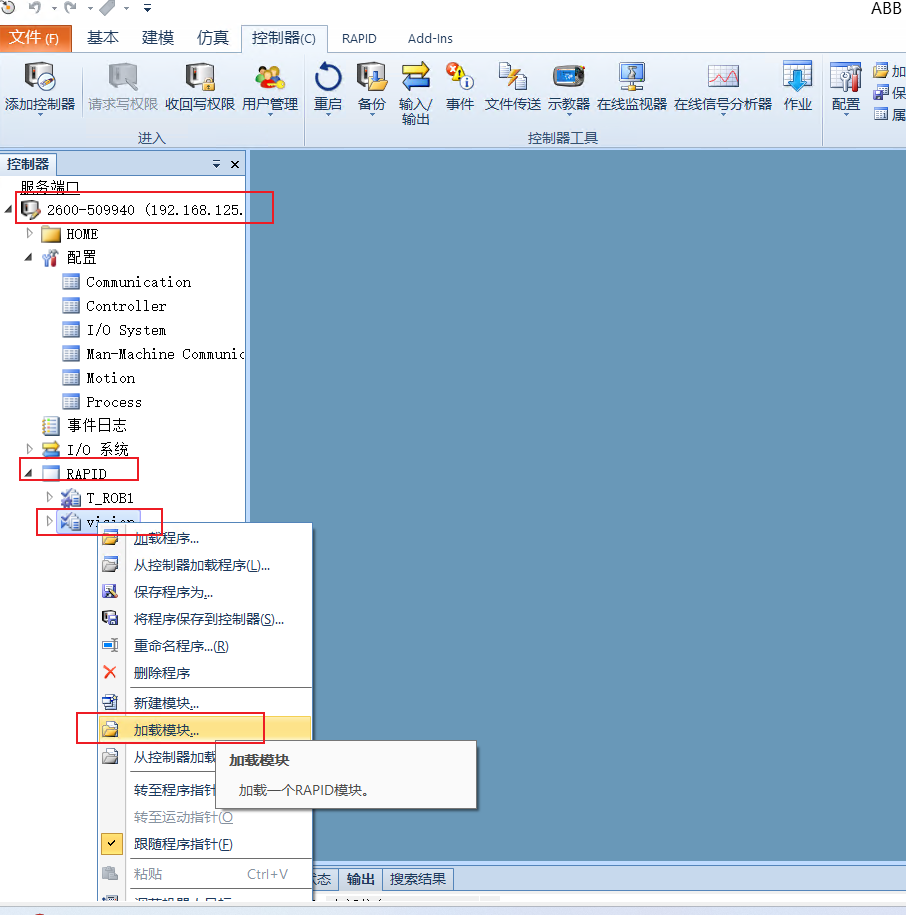
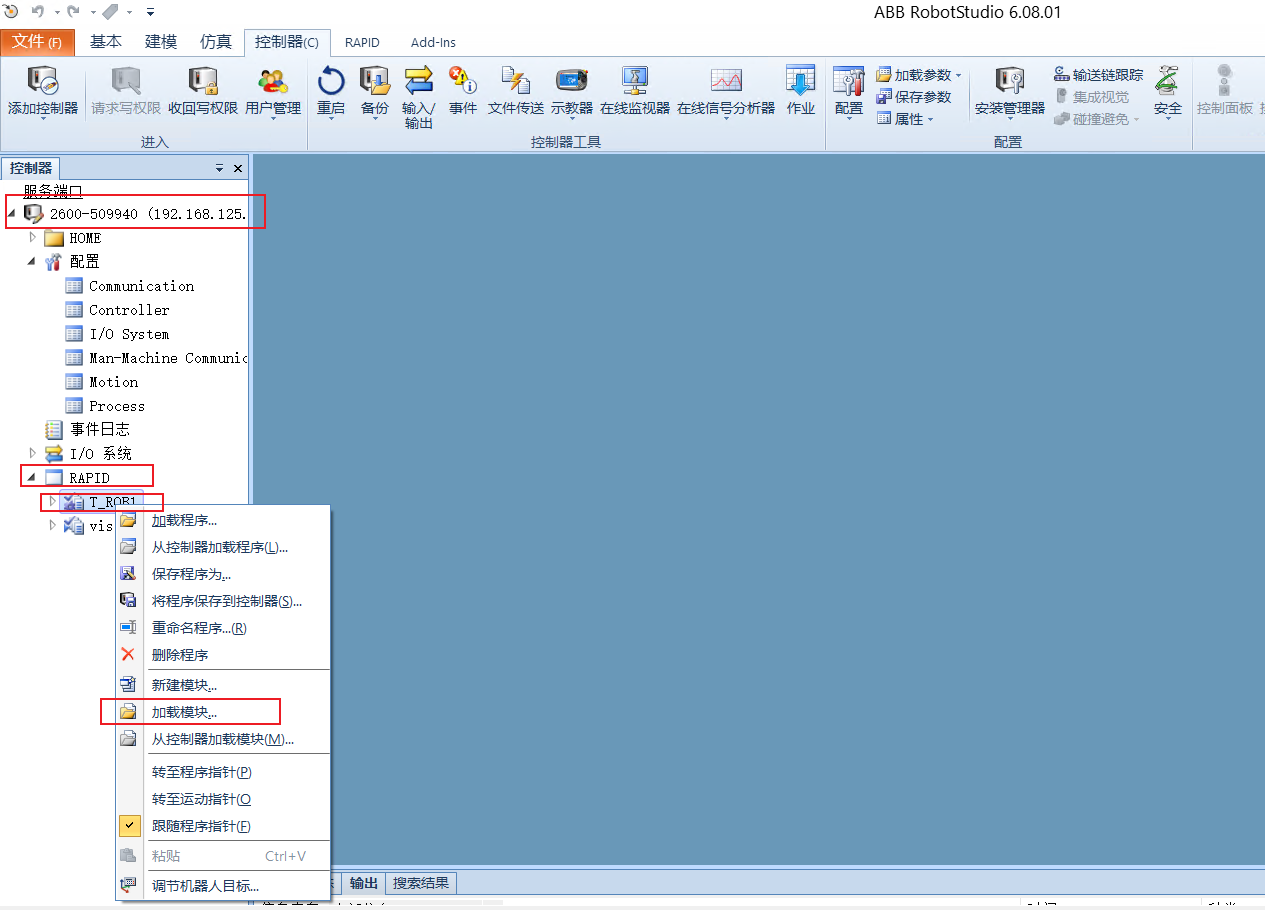
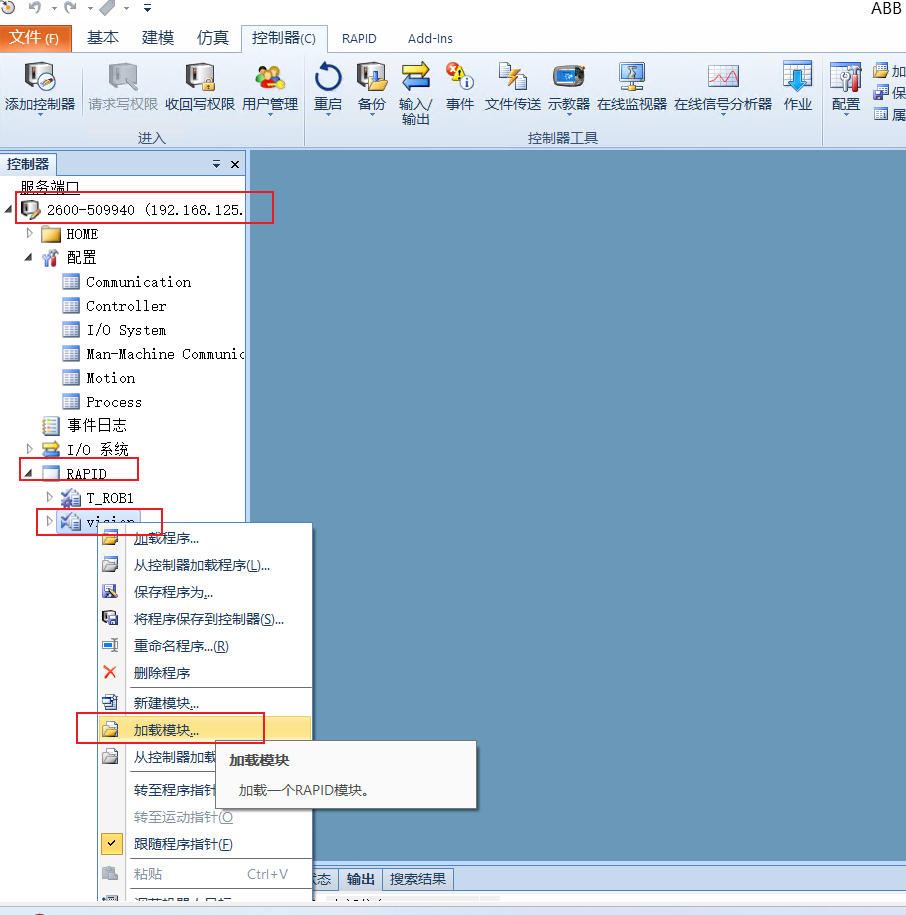
加载程序文件
使用RobotStudio软件连接到机器人。
我们先加载程序模块,选择下载程序中的:“MainModule.mod”文件,文件地址:New_ABB_Web_communication / RAPID / TASK1 / PROGMOD
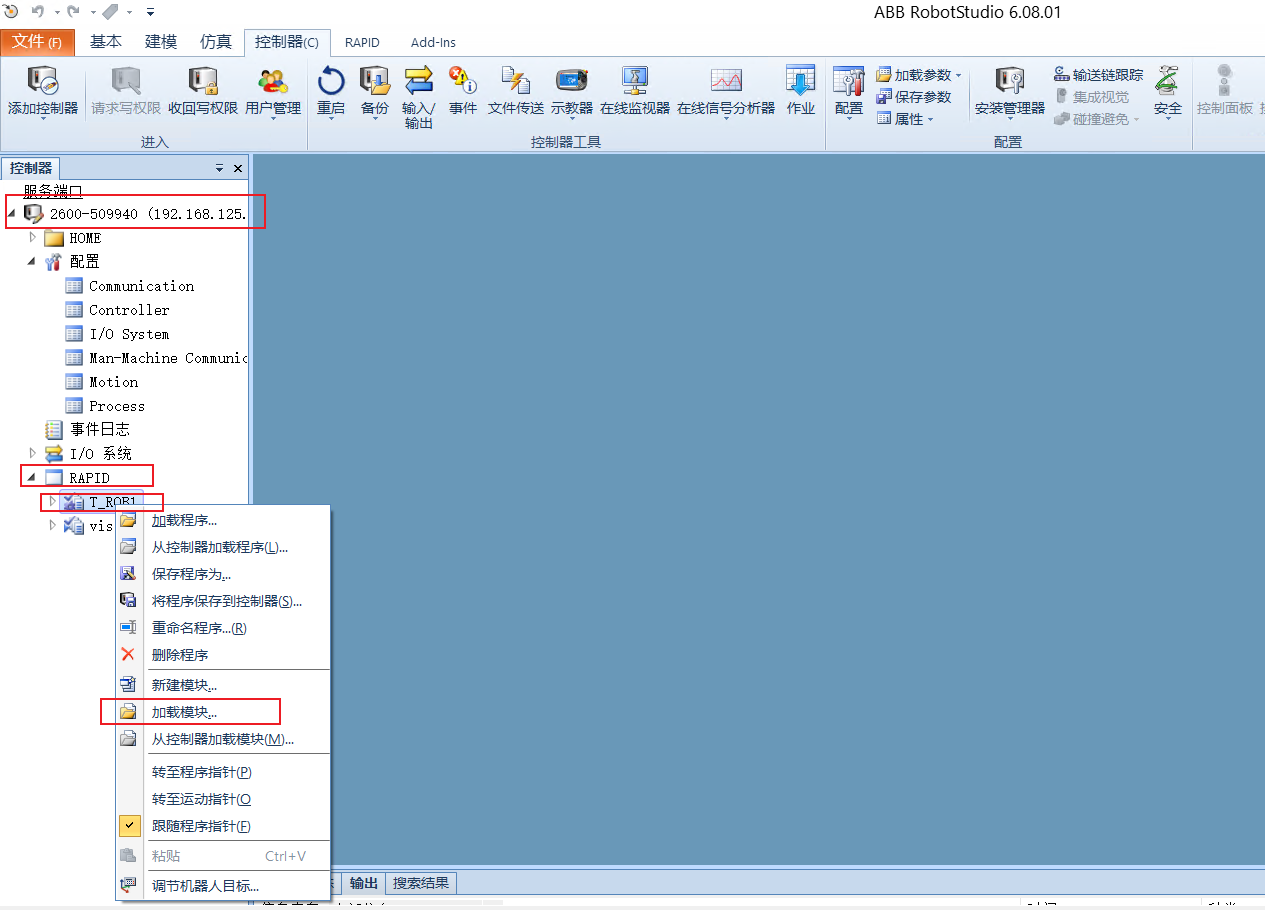
在加载系统模块,选择下载程序中的:“T_ROB_1_DAOAI_Socket.sys”、“DAOAI_Function.sys”、“Message_T_ROB1.sys”文件 文件地址:New_ABB_Web_communication / RAPID / TASK1 / SYSMOD