通讯应用示例
校准
手动校准通信示例
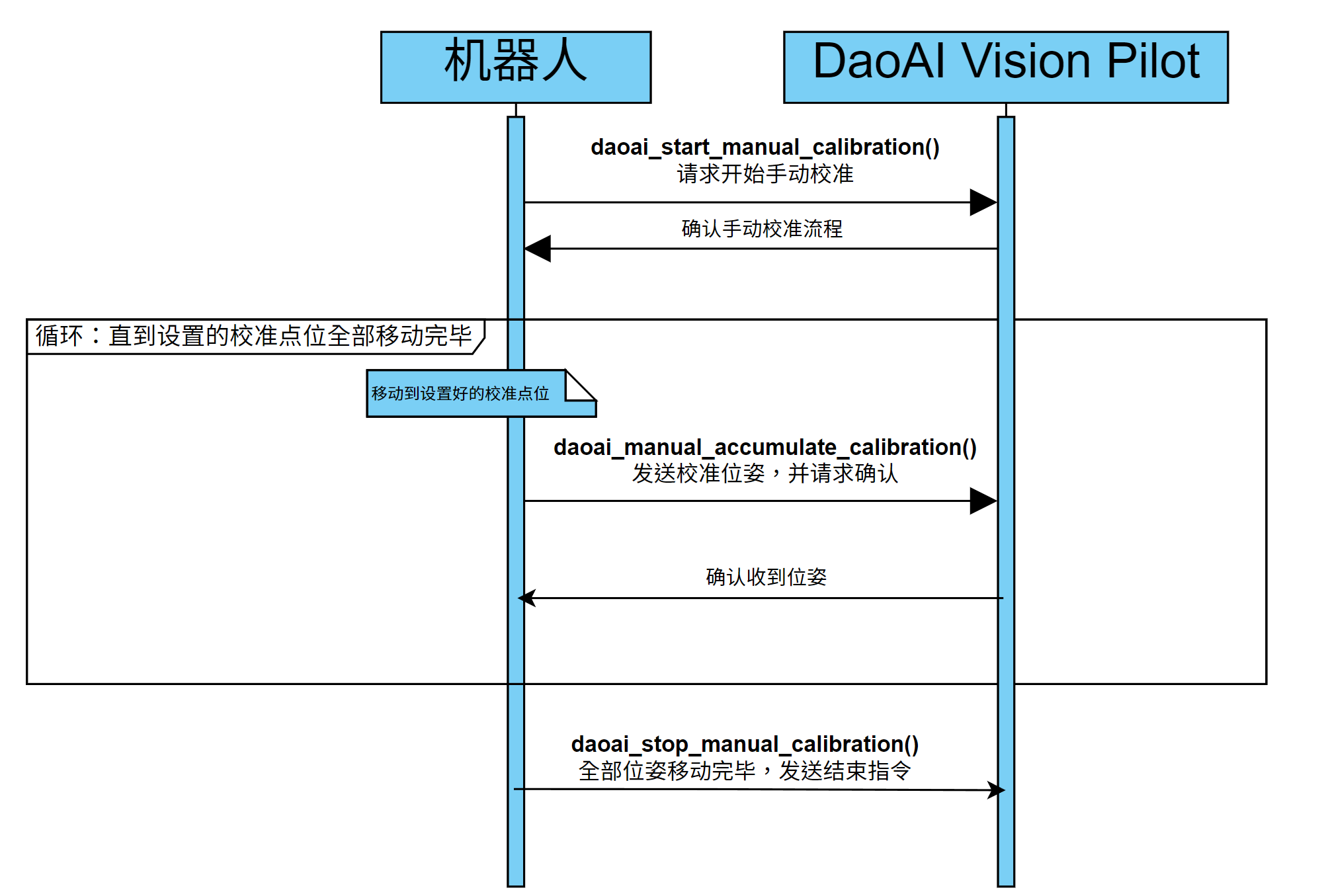
设置好机器人脚本中所有的校准位姿。
机器人调用API函数
daoai_start_manual_calibration()发送开始校准指令到 DaoAI Vision Pilot 。视觉回复并确认正处于手动校准模式,DaoAI Vision Pilot进入累计流程;否则,机器人停止程序。
机器人调用API函数
daoai_manual_accumulate_calibration()发送当前位姿, DaoAI Vision Pilot 进行储存、回复并确认,机器人继续进行下一个位姿移动;否则,机器人停止程序。在累计流程结束时(所有设置的校准位姿移动完毕)机器人调用API函数
daoai_stop_manual_calibration()表示已结束校准流程。
引导校准通信示例

设置好第一个校准位姿。
机器人使用 daoai_guidance_accumulate_calibration() 发送开始引导校准指令到DaoAI Vision Pilot。
视觉会进行拍摄并计算出下一个位姿,而且会对当前位姿作出提议,用户需根据视觉的提示移动机器人到更理想的位姿:
视觉判定当前校准位姿的成相是优良的,视觉会回复并显示下一个推荐的位姿,用户需移动到推荐位姿;
视觉判定当前校准位姿的成相是较差的,视觉会回复并显示该如何改进当前位姿,重新移动并采集和计算;
重复步骤2-3直到视觉收集到足够的校准位姿。
在累计流程结束时视觉向机器人发送结束状态,使机器人结束校准流程。
自动校准通信示例
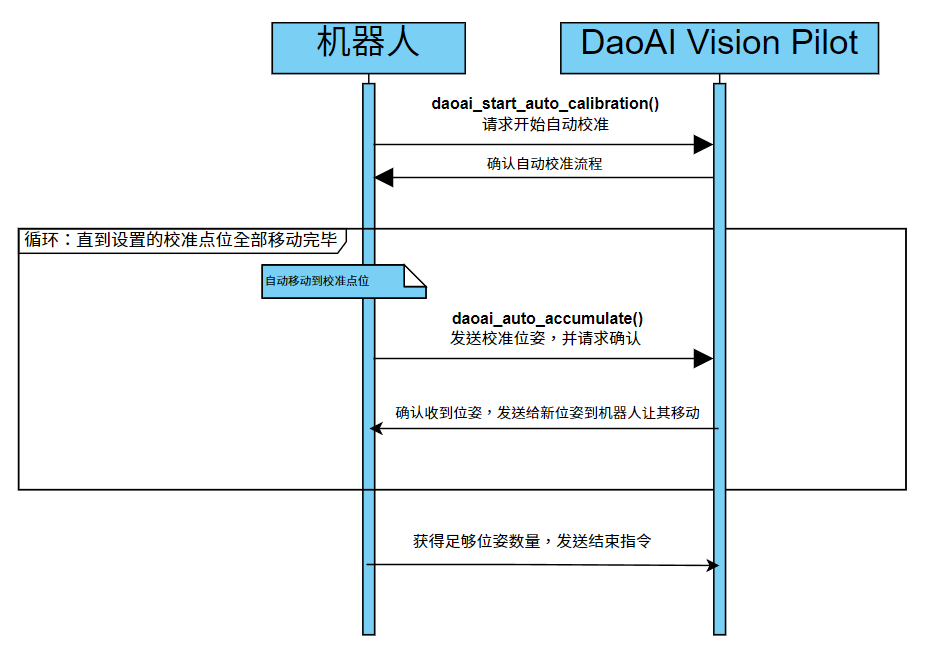
设置好第一个校准位姿。
机器人使用 daoai_start_auto_calibration() 发送开始自动校准指令到DaoAI Vision Pilot,并发送当前机器人位姿。
在确认DaoAI Vision Pilot处于正确的流程后,回复机器人进入采集图像和累计流程。
机器人使用 daoai_auto_accumulate() 指令让 DaoAI Vision Pilot 进入累计流程。视觉进行储存计算出下一个校准位姿,并回复下一个位姿移动机器人。
在累计流程结束时视觉向机器人发送结束校准流程状态。
示教
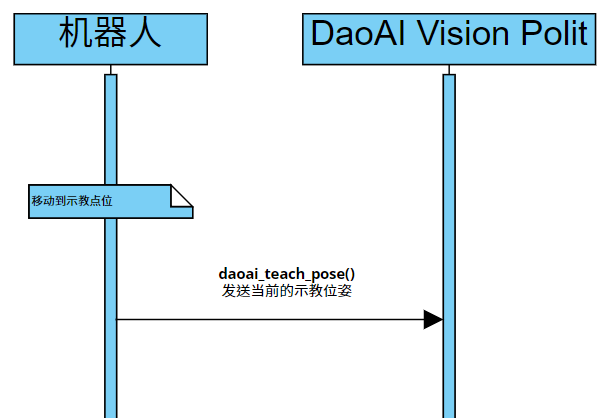
设置示教位姿。
机器人使用 daoai_teach_pose() 发送当前位姿到DaoAI Vision Pilot,不需要等待任何回复。
抓取和放置
抓取通信示例

设置好探测位姿,此位姿是抓取结束后机器人移动到的位姿,该位姿不能阻挡摄像头。
机器人使用 daoai_capture_and_process() 请求拍照并识别物体。
DaoAI Vision Pilot拍照成功并给予回复,表示视觉处于拍摄探测阶段;
机器人发送 daoai_get_picking_pose() 请求视觉发送抓取位姿;
- DaoAI Vision Pilot回复四种以下的可能性:
相机拍摄成功并且视觉成功探测到一个或多个物体时,视觉发送成功状态和抓取位姿。payload_1数值为剩余的需抓取物体数量,此payload会根据每次抓取结束后更新;
相机拍摄成功,视觉探测不成功或者场景中没有物体时,视觉发送:无有效物体状态;
相机拍摄成功,没有安全抓取位姿时,视觉发送:无安全抓取位姿状态;
相机拍摄失败时,视觉发送:拍摄失败状态;
DaoAI Vision Pilot回复的payload_1 代表物体剩余数量(包括当前发送的物体); payload_2 代表物体在深度学习中的标签码,用于区分物体种类。
场景内的物体抓取完成时,视觉会在最后一个需要抓取的物体信息中,payload_1 = 1,以此告知机器人剩余一个物体抓取,结束后将需要重新拍照。这时如果再调用daoai_get_picking_pose()则返回的payload_1 就会为0,代表没有可抓取的物体。
抓取 - 物体姿态修正 - 放置
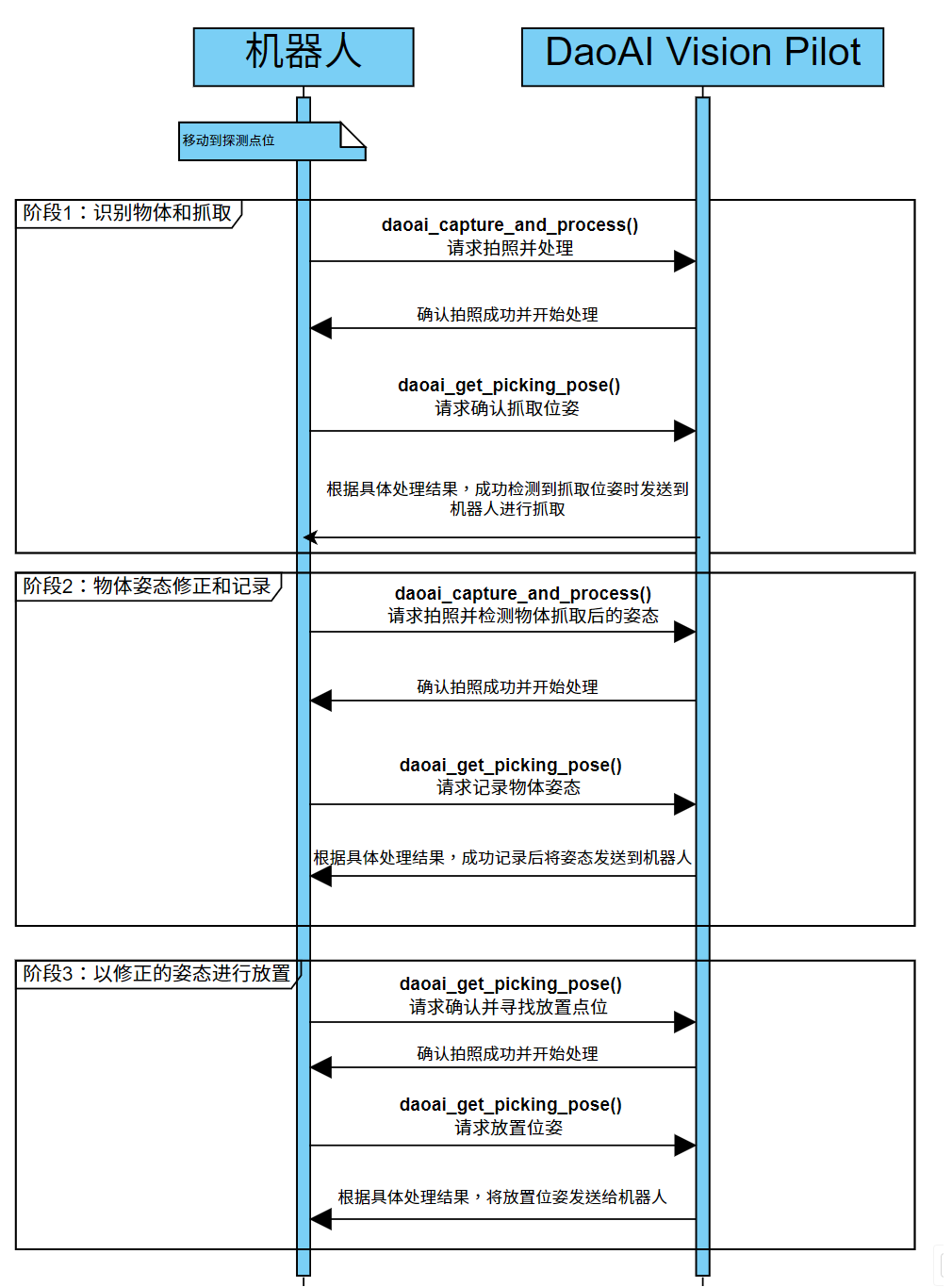
此流程是完整的:抓取物体,然后检测修正物体姿态,然后放置到指定区域的流程。
第一步抓取 :机器人请求 daoai_capture_and_process() 拍照并识别抓取点位。
DaoAI Vision Pilot回复拍照成功并给予回复,表示视觉处于拍摄探测阶段;
机器人发送 daoai_get_picking_pose() 请求视觉发送放置位姿;
- DaoAI Vision Pilot回复四种以下的可能性:
相机拍摄成功并且视觉成功探测到一个或多个物体时,视觉发送成功状态和抓取位姿。payload_1数值为剩余的需抓取物体数量,此payload会根据每次抓取结束后更新;
相机拍摄成功,视觉探测不成功或者场景中没有物体时,视觉发送:无有效物体状态;
相机拍摄成功,没有安全抓取位姿时,视觉发送:无安全抓取位姿状态;
相机拍摄失败时,视觉发送:拍摄失败状态;
第二步物体姿态修正 :机器人请求 daoai_capture_and_process() 拍照并识别物体。该步骤只是检测物体姿态,并不做移动。
DaoAI Vision Pilot回复拍照成功并给予回复,表示视觉处于拍摄探测阶段;
机器人发送 daoai_get_picking_pose() 请求视觉发送结果,这里视觉发回的是:当前物体于夹爪中的姿态,并在机器人端记录;
- DaoAI Vision Pilot回复三种以下的可能性:
相机拍摄成功并且视觉成功探测物体姿态时,视觉发送成功状态和当前物体于夹爪中的姿态。
相机拍摄成功,视觉探测不成功或者场景中无物体时,视觉发送:检测不到有效物体姿态。
相机拍摄失败时,视觉发送:拍摄失败状态;
第三步放置 :机器人请求 daoai_capture_and_process() 拍照并识别放置区域。
DaoAI Vision Pilot回复回复拍照成功并给予回复,表示视觉处于拍摄探测阶段;
机器人发送 daoai_get_picking_pose() 请求视觉发送结果,这里视觉发回的是:当前放置区域相对于示教时的初始位置的偏移量,并在机器人端记录;
- DaoAI Vision Pilot回复三种以下的可能性:
相机拍摄成功并且视觉成功探测放置区域时,视觉发送成功状态和放置位姿。和当前放置区域相对于示教时的初始位置的偏移量。
相机拍摄成功,视觉探测不成功或者场景中无目标时,视觉发送:检测不到有效放置点位。
相机拍摄失败时,视觉发送:拍摄失败状态。
机器人端计算出放置位置,然后移动至放置区域。