机器人通讯
本章会详细介绍机器人和DaoAI Vision Pilot之间的通讯协议。
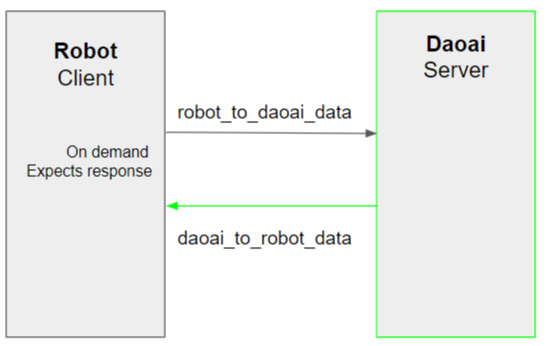
机器人和DaoAI Vision Pilot之间以发送指令 ↔️ 接收程序回应 的模式交换信息,其中机器人充当客户端,DaoAI Vision Pilot充当服务器。 机器人向DaoAI Vision Pilot发送请求,例如进行探测流程,DaoAI Vision Pilot在完成一系列操作后用相应的指令进行回复。 所有请求和等待都是同步的(单线程),在收到前一个等待的回应之前,应确保机器人在此期间不发送任何新请求。
DaoAI通讯接口
机器人品牌
DaoAI Vision Pilot 与众多不同品牌和型号的机器人之间都能进行沟通,以下会提供各个机器人品牌的示例脚本,帮助你更好的使用不同品牌的机器人。 各个品牌机器人示例 会详细各种机器人如何跟 DaoAI Vision Pilot 进行交互的例子。