快速入门
应用
案例分析
硬件
机器人通讯
支持
脚本如何运行 send_pose脚本解释 pick脚本解释 Manual_calibration脚本解释 auto_calibration脚本解释 guidance_accumulate_cal脚本解释
脚本如何运行
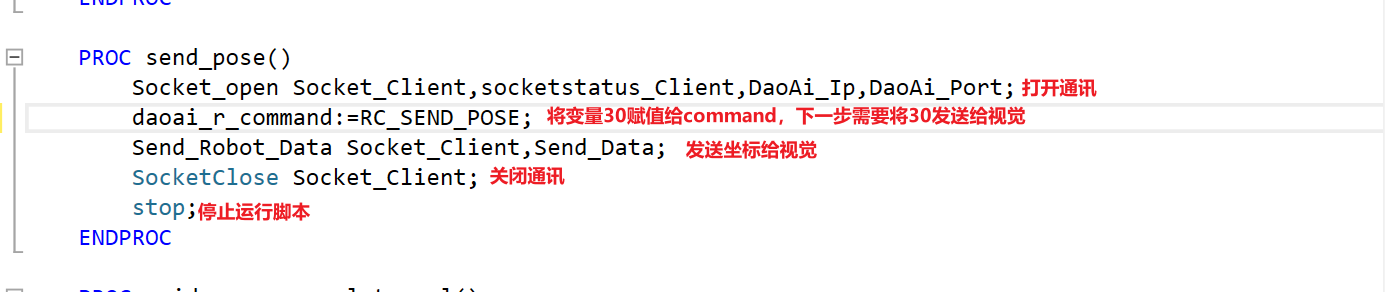
send_pose脚本解释
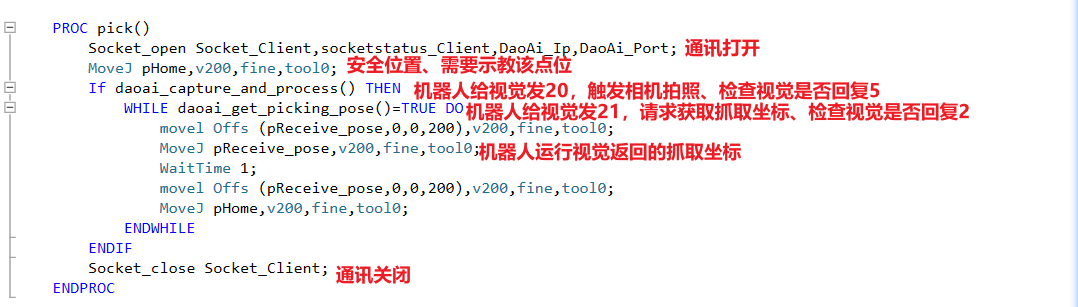
pick脚本解释
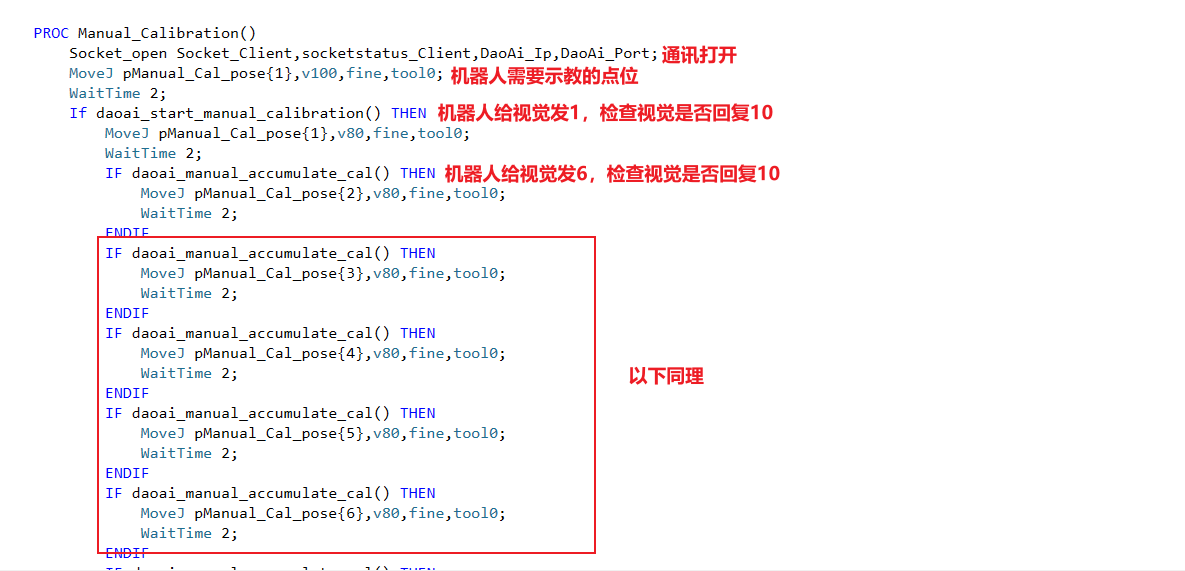
Manual_calibration脚本解释
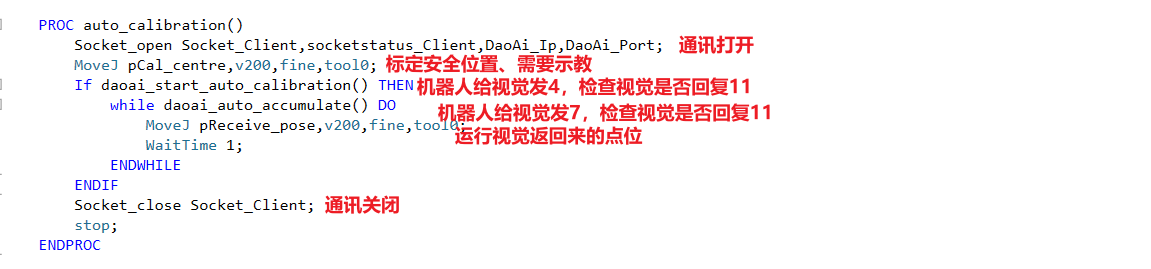
auto_calibration脚本解释
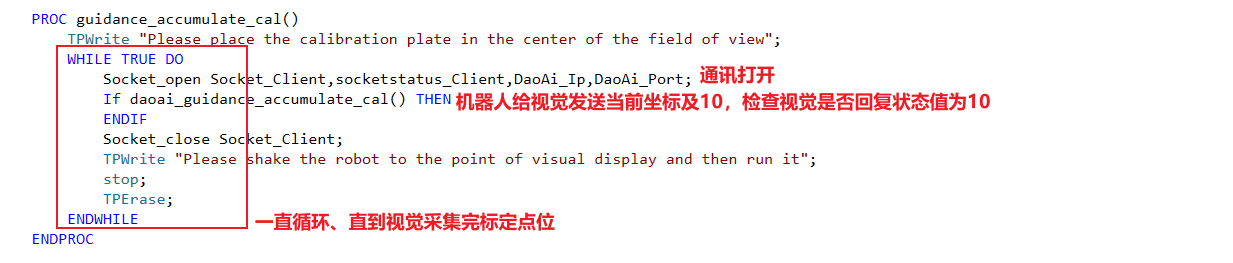
guidance_accumulate_cal脚本解释
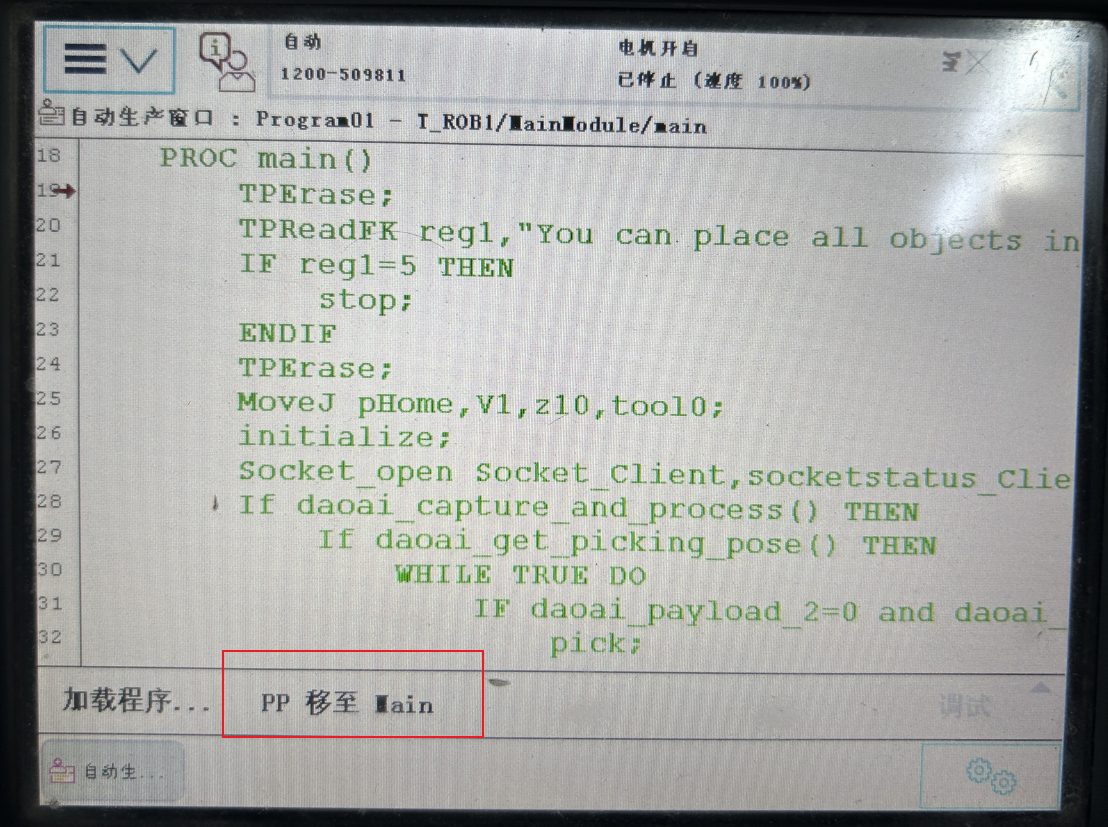
以ABB机器人IRC5C 紧凑型控制柜为例,机器人需要打到自动,并且上电。 将“Main”程序指针移动至最开始行。 点击示教器“按钮”运行。 此时示教器窗口会弹出上“"Please select program?"我们”选择“send_pose”,这样就可以运行了。
以ABB机器人IRC5C 紧凑型控制柜为例,机器人需要打到自动,并且上电。
将“Main”程序指针移动至最开始行。
点击示教器“按钮”运行。
此时示教器窗口会弹出上“"Please select program?"我们”选择“send_pose”,这样就可以运行了。
此脚本会将机器人当前点位信息发送给视觉。