任务部署
在设置好所有任务之后,就可以来到部署页面进行任务的部署。
部署后,所有任务都会准备好等待机器人调用。

抓取部署示例
以UR 机器人为例
首先确认您想要在机器人上调用运行的任务的task id。

打开机器人抓取脚本,确保您的ip和端口正确。ip 应该和DaoAI Vision Pilot运行
使用帮助函数daoai_task_id(id) 来设置您要运行的task id, 这样接下来调用的capture_and_process()函数,和get_picking_pose()函数,都会调用并请求运行对应的任务。

备注
- 如果您想要运行多个任务,您可以这样添加您的脚本。想要运行其它任务时,需要再次调用daoai_task_id(id)来切换到接下来想要请求的任务task id

在网页界面来到部署界面,点击部署。并运行您的UR程序。

机器人运行并抓取物体,同时检测的结果也会在显示窗口中显示出来。
- 2D显示:会显示出2D检测的结果

- 3D显示:显示点云对齐后的结果

- 抓取策略显示:显示物体的坐标,以及物体的抓取顺序。

物体姿态修正和放置部署示例
以UR 机器人为例
示教步骤
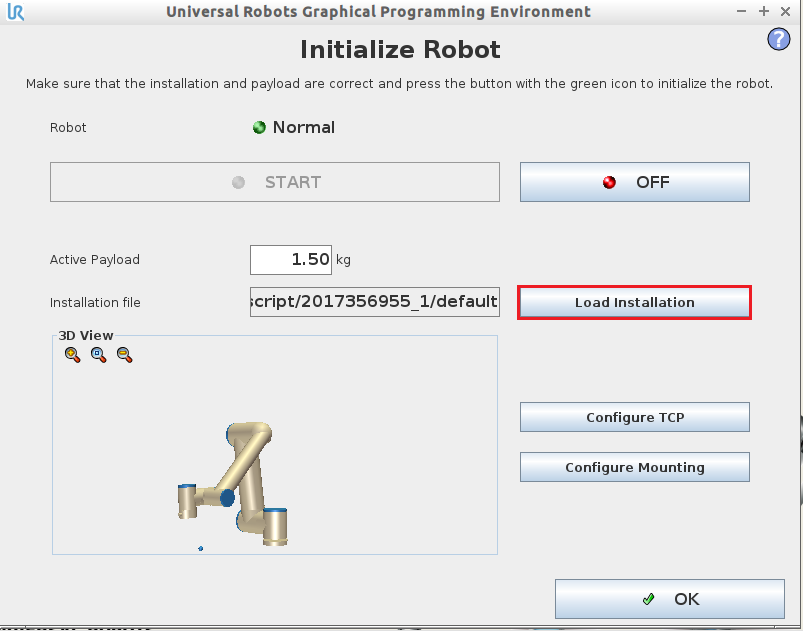
- 首先打开示教的脚本。

备注
- 如果您看到有黄色的部分,如下图,则说明您的机器人Installation File有错误。

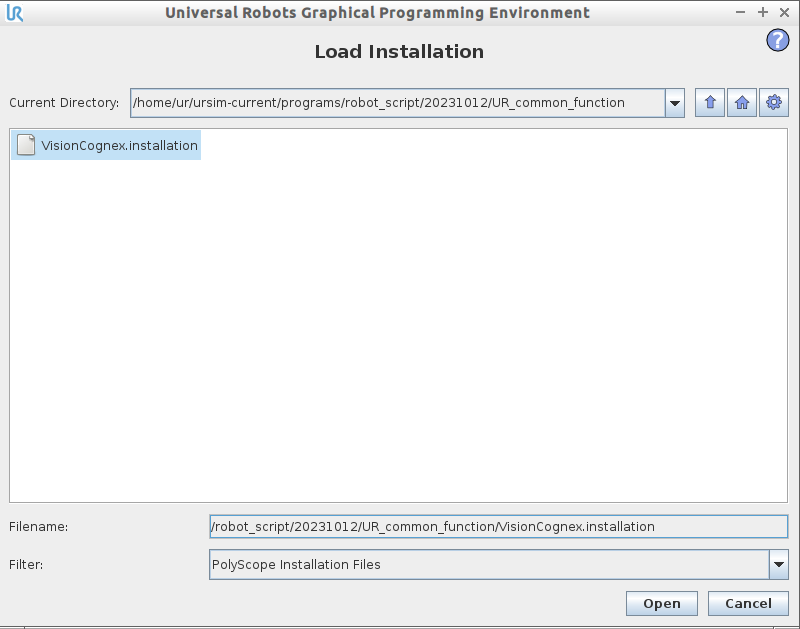
- 请读取UR_common_function下的 VisionCognex.Installation
- 然后点击Update Program
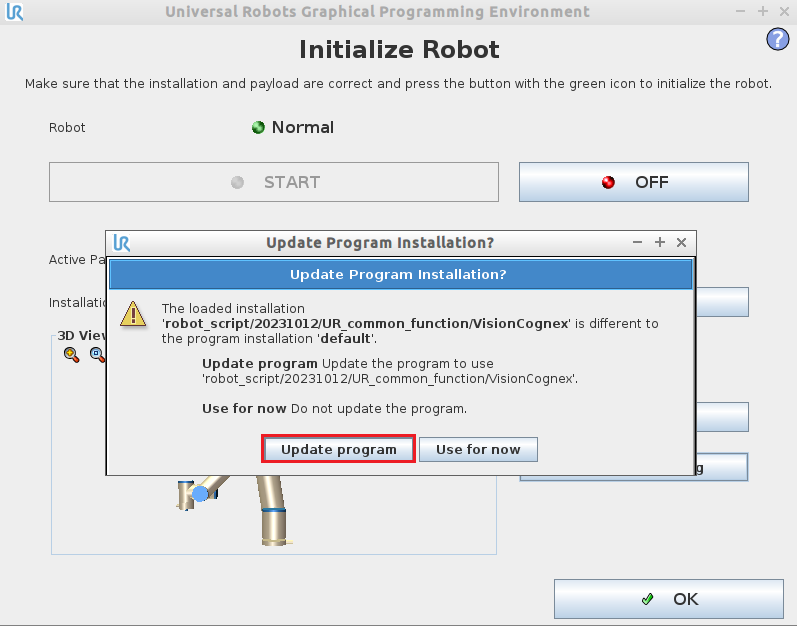
- 然后您就会看到您的脚本没有标识黄色的部分了,并且在您的Installation/Varirable里,应该可以看到下图中的两个变量(这两个变量是用于计算物体放置姿态用的中间计算变量)

- 设置标准放置位置:将物体以标准抓取姿态,固定在夹爪上,然后以标准放置姿态,放置于 放置区域 的上方。 并在机器人脚本中定义 tool_in_base_wp 位置为该位置。


警告
放置区域的位置 ,和 物体在夹爪上的位置 在示教过程中 不能移动 ,如果在中途产生了移动,则需要重新开始
- 设置安全旋转位置:在当前位置,设置lift_obj_pose的From point, 然后向上方移动机器人到一个安全的旋转位置(旋转物体至面向相机),并设置lift_obj_pose的To point.
-



- 设置物体检测位置:将物体移动至面向相机的检测位置,并定义 adjust_det_pose。


- 设置放置区域检测位置:将机器人移动到不会遮挡放置区域的任意位置,然后设置 place_det_pose。


- 设置对应的task id, 第一个task id 对应 物体姿态修正(In-Hand Adjustment) 任务 第二个对应 物体放置(Placement) 任务

在Vision Pilot 网页界面中点击部署,然后运行机器人脚本,完成放置示教。
部署
- 打开Picking and Place脚本,确保读取的是和示教步骤相同的Installation File。

- 设置抓取步骤 stage == 0:设置检测task id,定义detection_pose 为物体检测位置。该步骤会执行抓取,并进入stage 1 - 物体姿态修正 (如果需要跳过某个步骤,则可以更改stage 变量来跳过)

- 设置物体姿态修正步骤 stage == 1:设置对应的task id,定义 adjust_det_pose 为物体姿态检测位置。该步骤会检测并记录当前物体于夹爪中的姿态,并进入stage 2 - 物体放置

- 设置放置区域检测步骤 stage == 2:设置对应的task id,定义 place_det_pose 为放置区域检测位置。该步骤会检测并记录放置区域的偏移量,并进入stage 3 - 物体放置

- 设置放置区域检测步骤 stage == 3:设置预放置位置pre_drop_pose为放置区域的上方。该步骤会计算放置位置,并移动机器人至放置位置然后循环至起始。

在Vision Pilot 网页界面中点击部署,然后运行机器人脚本执行 抓取 - 物体姿态修正 - 放置 任务流程。