UR机器人通讯接口
本章会详细介绍机器人和DaoAI机器人视觉认知系统之间的通讯协议。
备注
DaoAI机器人程序所用的计量单位为 毫米-mm, 旋转计量单位为 度-°
该协议只适用于DaoAI网页版机器人视觉认知系统软件
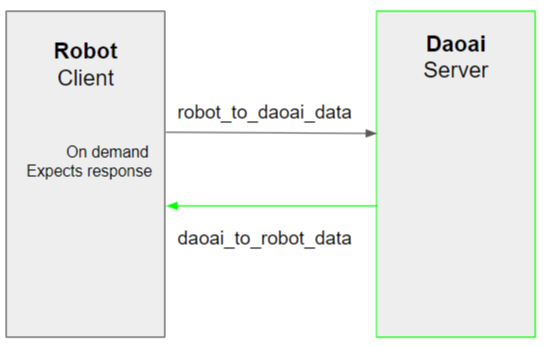
机器人和DaoAI机器人视觉认知系统之间以发送指令 ↔️ 接收程序回应 的模式交换信息,其中机器人充当客户端,DaoAI机器人视觉认知系统充当服务器。 机器人向视觉认知系统发送请求,例如进行探测流程,视觉认知系统在完成一系列操作后用相应的指令进行回复。 所有请求和等待都是同步的(单线程),在收到前一个等待的回应之前,应确保机器人在此期间不发送任何新请求。
连接详细信息
类型/Type |
TCP/IP socket |
端口/Port |
6969 (TCP) |
字节顺序/Byte order |
Network order (big endian) |
一旦视觉认知系统启动,它就会侦听TCP端口 6969 并等待,直到机器人发起连接。这是在机器人端通过打开对视觉认知系统的IP地址和给定端口的TCP套接字来完成的。
可以在视觉认知系统的网络设置中找到并更改视觉认知系统系统的IP地址。
协议/Protocol
视觉认知系统 和机器人之间的指令和回应消息都是固定长度的。因为消息协议的长度是固定的,即使机器人短的编程功能有限,也会比较容易实现。
备注
请求和回应消息具有固定长度,并且没有开始和/或结束字符。虽然TCP/IP协议可防止数据丢失,但机器人客户端实现负责通过计算发送/接收的字节数并与预期的消息大小进行比较来跟踪消息之间的边界。
请求和回应消息由多个字段组成,每个字段为一个 int32 (4 bytes)。 浮点数据(如距离和角度)将乘以一个恒定系数 MULT = 10000 , 再作为int32发送。 然后,接收端通过将接收的值除以该系数来解码此字段。 负数使用二进制补码进行编码。
请求消息
从机器人发送到视觉认知系统的指令消息长度为48个字节,由以下字段组成:
字段 |
类型 |
长度 |
描述 |
Position/位置字段 |
int32[3] |
12 bytes |
机器人法兰位置 (XYZ,以毫米为单位) 用右手机器人底座表示。每个字段都必须乘以MULT系数. |
Orientation/旋转字段 |
int32[4] |
16 bytes |
机器人法兰方向用右手机器人底座框架表示。方向编码和单位取决于所选的方向约定。每个字段都必须乘以 MULT系数. |
command/指令字段 |
int32[4] |
16 bytes |
请求指令 |
payload/载荷字段 |
int32[2] |
8 bytes |
可选的有效载荷字段。 |
meta |
int32[2] |
8 bytes |
meta_1,即消息的倒数第二个字段,应发送机器人的类型,meta_2,即消息的最后一个字段,应发送机器人协议版本。详细信息请参阅本文Meta消息说明。 |
所有字段都是必填的,并且必须为每个请求设置合理的值。有效载荷字段只对某写流程和指令有效。无效的字段请赋予零。
指令字段command可以控制视觉认知系统执行不同的流程。下面将更详细地解释可能的指令及其对应的回应消息。
回应消息
除姿势更新请求外,所有请求指令都使用64字节长的回应消息进行应答,其结构如下:
字段 |
类型 |
长度 |
描述 |
Position/位置字段 |
int32[3] |
12 bytes |
物体位置或拾取点偏移平移(XYZ,单位为毫米),具体取决于回应状态。另请参阅更详细的指令说明。每个值都必须除以MULT。 |
Orientation/旋转字段 |
int32[4] |
16 bytes |
物体方向或拾取点偏移旋转,具体取决于回应状态。另请参阅更详细的指令说明。编码和单位取决于所选的定向约定,并且必须用MULT除以。 |
payload/载荷字段 |
int32[6] |
24 bytes |
可选的有效载荷字段。编码和单位取决于所选的定向约定,并且必须用MULT除以。 |
status/状态字段 |
int32 |
4 bytes |
定义的状态值之一。 |
meta |
int32[2] |
8 bytes |
meta_1,即消息的倒数第二个字段,应发送机器人的类型,meta_2,即消息的最后一个字段,应发送机器人协议版本。详细信息请参阅本文Meta消息说明。 |
并非每个指令回应都传达姿态信息或附加有效载荷。状态字段 可以用来控制position、orientation和payload字段的解读方式。在以下各节中,将更详细地说明各个指令及其对应的回应。
备注
- Orientation字段四位整数顺序说明:
目前视觉认知系统对支持机器人所用的 Orientation/定位字段 收发顺序为
ABB: 四元数,字节分别是[x, y, z, w] 或 (q2,q3,q4,q1);WeRobotics视觉认知系统 的四元数 顺序为 [x, y, z, w], 部分系统使用四元数的顺序为 [w, x, y, z], 所以在发送和接收四元数时需要注意顺序。
UR: AxisAngle(轴线角) [rx, ry, rz, 0]
Staubli, Aubo, Dobot, Mitsubishi: Euler(欧拉角) XYZ旋转,字节分别是[rx, ry, rz, 0]
Hanwha, Kuka, Yaskawa: Euler(欧拉角)ZYX旋转,字节分别是[rx, ry, rz, 0]
Efort: Euler(欧拉角)ZYZ旋转顺序,字节分别是[rz, ry, rz, 0]
可用指令(Command)
RC_NO_COMMAND = -1 (机器人姿势更新)
将当前的机器人法兰姿势发送给视觉认知系统。视觉认知系统使用此信息来确定机器人是否仍处于连接状态,以及更新视觉认知系统网络界面中的3D视图。
RC_START_MANUAL_CALIBRATION = 1
发送校准模式开始指令到视觉,此指令属于机器人和视觉认知系统的握手。视觉认知系统可以处于CALIBRATION 模式
当视觉发送的指令并非以下的指令时,视觉所在的流程与机器人不符,机器人需重新发送 RC_START_MANUAL_CALIBRATION = 1 ,并重新进行此握手。
回应
字段
模式
描述
状态
DAOAI_MODE_CALIBRATION= 10
视觉认知系统处于手动、引导校准流程
RC_STOP_MANUAL_CALIBRATION = 2
触发视觉认知系统停止校准板图像采集和累积流程。请注意,发送此指令时,视觉认知系统必须处于校准模式。
回应
字段
模式
描述
状态
DAOAI_DONE_CALIBRATION = 33
视觉认知系统终止校准模式
RC_START_AUTO_CALIBRATION = 4
发送校准模式开始指令到视觉,此指令属于机器人和视觉认知系统的握手。视觉认知系统可以处于自动校准模式。
当视觉发送的指令并非以下的指令时,视觉所在的流程与机器人不符,机器人需重新发送 此指令进行握手。
回应
字段
模式
描述
状态
DAOAI_MODE_AUTO_CALIBRATION = 11
视觉认知系统处于自动校准图像采集和累计流程。
RC_MANUAL_ACCUMULATE_POSE = 6
请求视觉认知系统进入图像采集和累计流程,进行校准。若视觉发送的指令非以下指令,则机器人与视觉处于不同的模式/流程,机器人将发送 RC_START_MANUAL_CALIBRATION = 1(手动校准),并重新回到校准流程的握手状态。
回应
字段
模式
描述
状态
DAOAI_MODE_CALIBRATION = 10
视觉认知系统处于手动校准模式
RC_AUTO_ACCUMULATE_POSE = 7
请求视觉认知系统进入图像采集和累计流程,进行校准。若视觉发送的指令非以下指令,则机器人与视觉处于不同的模式/流程,机器人将发送 RC_START_AUTO_CALIBRATION = 4(自动校准),并重新回到校准流程的握手状态。
回应
字段
模式
描述
状态
DAOAI_MODE_AUTO_CALIBRATION = 11
视觉认知系统处于自动校准图像采集和累计流程。
状态
DAOAI_DONE_AUTO_CALIBRATION = 33
视觉认知系统以获得足够多的校准点位,回馈机器人停止校准
RC_GUIDANCE_CALIBRATION = 10
机器人发送此指令到视觉用以发送引导校准的位姿,视觉会接收位姿信息,不会给予回应。
RC_START_2D_AUTO_CALIBRATION = 11
发送2D校准模式开始指令到视觉,此指令属于机器人和视觉认知系统的握手。视觉认知系统可以处于自动校准模式。
当视觉发送的指令并非以下的指令时,视觉所在的流程与机器人不符,机器人需重新发送 此指令进行握手。
回应
字段
模式
描述
状态
DAOAI_MODE_2D_AUTO_CALIBRATION = 14
视觉认知系统处于2D自动校准模式,并发送下一个校准点位至机器人,使机器人移动到该点位
状态
DAOAI_DONE_2D_AUTO_CALIBRATION = 34
视觉认知系统以获得足够多的校准点位,回馈机器人停止校准
RC_AUTO_ACCUMULATE_2D_POSE = 12
请求视觉认知系统进入图像采集和累计流程,进行校准。若视觉发送的指令非以下指令,则机器人与视觉处于不同的模式/流程,机器人将发送 RC_START_2D_AUTO_CALIBRATION = 11(2D自动校准),并重新回到校准流程的握手状态。
回应
字段
模式
描述
状态
DAOAI_MODE_2D_AUTO_CALIBRATION = 14
视觉认知系统处于2D自动校准模式,并发送下一个校准点位至机器人,使机器人移动到该点位
状态
DAOAI_DONE_2D_AUTO_CALIBRATION = 34
视觉认知系统以获得足够多的校准点位,回馈机器人停止校准
RC_DAOAI_CAPTURE_AND_PROCESS_ASYNC = 19
请求视觉认知系统进行探测流程,让视觉拍照并识别流程,不会阻塞机器人。此消息必须含有机器人目前的位姿信息。
回应
字段
模式
描述
状态
DAOAI_DETECTION_MODE = 5
视觉认知系统回馈握手信息,认知目前处于拍照并识别流程。
RC_DAOAI_CAPTURE_AND_PROCESS = 20
请求视觉认知系统进行探测流程,让视觉拍照并识别流程,会阻塞机器人至拍照结束。此消息必须含有机器人目前的位姿信息。
回应
字段
模式
描述
状态
DAOAI_DETECTION_MODE = 5
视觉认知系统回馈握手信息,认知目前处于拍照并识别流程。
RC_DAOAI_PICK_POSE = 21
请求视觉认知系统发送物体位姿;此指令只出现在 DAOAI_DETECTION = 5 之后。当视觉探测并发送了位姿给机器人后,机器人进行抓取,然后重复回复视觉 RC_DAOAI_PICK_POSE = 21 请求下一个物体的位姿。
回应
字段
模式
描述
状态
DAOAI_OBJECTS_FOUND = 2
视觉认知系统探测到物体并把物体抓取位姿回复到机器人,机器人将根据位姿进行抓取。
状态
DAOAI_NO_OBJECT_FOUND = 3
视觉认知系统探测不到物体回复到机器人,机器人将根据当前脚本进入下一阶段。
状态
DAOAI_NO_COLLISION_FREE_POSE= 4
视觉认知系统回馈错误信息,避碰模块无法找到任何安全位姿,机器人将根据脚本进入不同的阶段。
RC_SEND_POSE = 30
机器人发送此指令到视觉用以发送示教位姿,视觉会接收位姿信息,不会给予回应。
RC_CHECK_EMPTY_BOX = 40
请求视觉认知系统检查箱体(ROI)区域是否为空,通常在收到 DAOAI_NO_OBJECT_FOUND = 3 之后使用。使用时 要使用payload_1 指定要进行检测的task id, 或者使用daoai_switch_task(id)函数来指定。
如果箱体不为空,但是无法检测到物体,那么就可以考虑使用机器人去晃动箱体再尝试检测。
回应
字段
模式
描述
状态
DAOAI_BOX_EMPTY = 41
视觉检测ROI区域为空,判断条件为 ROI区域<2000个点 和 检测流程没有检测到物体.
状态
DAOAI_BOX_NOT_EMPTY= 42
视觉检测ROI区域仍有存在物体,判断条件为 ROI区域>2000个点 或 检测流程有检测到至少一个物体.
RC_PRECISION_CHECK= 50
请求视觉运行precision check。使用时 要使用payload_1 指定已创建的precision check task id, 或者使用daoai_switch_task(id)函数来指定。
回应
字段
模式
描述
状态
DAOAI_PRECISION_CHECK_SUCCESS= 51
检测成功,返回值的payload_1为计算出的误差。
状态
DAOAI_PRECISION_CHECK_FAIL= 52
检测失败,通常是因为无法检测到精度验证图形码
RC_SWITCH_CONFIG = 69
请求视觉认知系统切换相机配置;此指令发送到视觉端时,视觉会根据消息中的载荷字段1(payload_1)的整数,切换相机配置。此相机配置会在视觉端上设置好,根据整数切换用户预设的配置。如:payload_1 = 1, 切换 config_1;payload_1 = 3, 切换 config_3等。
回应
字段
模式
描述
状态
DAOAI_SWITCH_CONFIG_SUCCESS = 66
切换相机配置成功
状态
DAOAI_SWITCH_CONFIG_FAIL = 67
切换相机配置失败
载荷字段 Payload
载荷字段在抓和放时,所表示的意思并不相同:payload_1会被用作基本的抓放信息交换,抓的时候payload_1 代表的是剩余物体数量:如在场景中探测到了5个物体,第一个位姿发送时payload_1 = 5;放的时候payload_1 代表的是物体的种类(在没有分类时此payload可被忽略或者用于其他用途):如在场景中会出现5类物体,此次抓取到的是第四类物体 payload_1 = 4。
警告
在抓取时:
DaoAI机器人视觉认知系统 给机器人发送的payload_1:代表 物体的剩余数量。
机器人给 DaoAI机器人视觉认知系统 发送的payload_1:代表 执行task的id。
例:DaoAI机器人视觉认知系统 有2个task; task_1 的id 为0,task_2的id为1。想要执行task_1时,机器人的payload_1就应该为0。 想要执行task_2时,机器人的payload_1就应该为1。
其他的payload可根据用户具体案例自由使用。
全局常量
机器人发送指令常量
RC_DAOAI_NO_COMMAND = -1
# Manual Calibration/ Guidance Calibration
RC_START_MANUAL_CALIBRATION = 1
RC_STOP_MANUAL_CALIBRATION = 2
RC_MANUAL_ACCUMULATE_POSE = 6
# Auto Calibration
RC_START_AUTO_CALIBRATION = 4
RC_AUTO_ACCUMULATE_POSE = 7
RC_GUIDANCE_CALIBRATION = 10
RC_START_2D_AUTO_CALIBRATION = 11
RC_AUTO_ACCUMULATE_2D_POSE = 12
# Picking
RC_DAOAI_CAPTURE_AND_PROCESS_ASYNC = 19
RC_DAOAI_CAPTURE_AND_PROCESS = 20
RC_DAOAI_PICK_POSE = 21
#Teach
RC_SEND_POSE = 30
#Check empty box
RC_CHECK_EMPTY_BOX = 40
#Check robot driftting
RC_PRECISION_CHECK = 50
#Camera Config
RC_SWITCH_CONFIG = 69
机器人视觉认知系统回应常量
DAOAI_UNKNOWN_COMMAND = -1
#视觉认知系统抓取校准流程
DAOAI_OBJECTS_FOUND = 2
DAOAI_NO_OBJECT_FOUND = 3
DAOAI_NO_COLLISION_FREE_POSE = 4
DAOAI_CAPTURE_SUCCESS = 5
DAOAI_DROP_OFF_POSE = 6
DAOAI_CAPTURE_FAIL = 9
#视觉认知系统处于手动校准流程
DAOAI_MODE_CALIBRATION = 10
#视觉认知系统处于自动校准流程
DAOAI_MODE_AUTO_CALIBRATION = 11
DAOAI_MODE_2D_AUTO_CALIBRATION = 14
#终止指令
DAOAI_DONE_CALIBRATION = 33
DAOAI_DONE_2D_AUTO_CALIBRATION = 34
#check empty box
DAOAI_BOX_EMPTY = 41
DAOAI_BOX_NOT_EMPTY = 42
#Robot drift check
DAOAI_PRECISION_CHECK_SUCCESS = 51
DAOAI_PRECISION_CHECK_FAIL = 52
#相机配置更换
DAOAI_SWITCH_CONFIG_SUCCESS = 66
DAOAI_SWITCH_CONFIG_FAIL = 67
接口/Interface
下文提出了一个应用程序接口,供程序员在集成新机器人时使用。从高层次来看,应用程序接口包括以下功能:
Global Variables/全局变量
Initialization/初始化设置
Networking/收发和通讯
Calibration/校准函数
Pick & Place/抓放函数
以下为机器人端的脚本函数示例,均为伪代码:
Global Variables/全局变量
所有的接口函数都会使用以下所以的全局变量:
mult=10000
#UR Robot type = 7
DAOAI_ROBOT_TYPE = 7
DAOAI_META_VERSION = 1
#Pose Object
daoai_tcp_pose = p[0,0,0,0,0,0]
daoai_payload_1 = 0
daoai_payload_2 = 0
daoai_payload_3 = 0
daoai_payload_4 = 0
daoai_payload_5 = 0
daoai_payload_6 = 0
#meta info
daoai_socket_name = "daoai"
daoai_socket
daoai_status = 0
daoai_r_command = 0
daoai_task_id = 0
daoai_num_remaining_objects = 0
Initialization
daoai_init(IP, port)
Parameters:
IP: string(字符串) → 连接目标的IP地址
port: int (整数)→ 连接目标的端口,通常默认为:“6969”
Info:
机器人使用此函数建立Socket,设置IP和端口
Return type:
Boolean(布尔值):成功打开Socket后返回True。
Pseudo-code:
def daoai_init(ip, port): if (not socket_open(daoai_ip, daoai_port, daoai_socket_name)): #if open socket failed, return false return False end return True end
Networking/收发和通讯
send_robot_data()
Parameters:
N/A
Info:
机器人发送数据至视觉
Return type:
Void
Pseudo-code:
def send_robot_data(): sync() #synchronization for multi-threading pose = actual_pose #assign actual robot pose to variable "pose" acquire_lock #lock the block of data, prevent value changes during sending assign_data_to_msg_block #assign all necessary data to the sending block release_lock sync() end
recv_robot_data()
Parameters:
N/A
Info:
机器人发送数据至视觉
Return type:
Void
Pseudo-code:
def send_robot_data(): sync() #synchronization for multi-threading pose = actual_pose #assign actual robot pose to variable "pose" acquire_lock #lock the block of data, prevent value changes during sending assign_data_to_msg_block #assign all necessary data to the sending block release_lock sync() end
send_robot_data_2d(plane, optional_z = False, z_value = 0)
Parameters:
plane: 机器人发送时会将当前3D位置 转换到该平面然后发送。
optional_z: 默认为False, 发送的坐标z值为当前z值(视觉在读取2D坐标时会无视z值)。如果为True, 则会使用 z_value 作为发送坐标的z值。
z_value : 默认为0, 如果optional_z为True, 则会使用 z_value 作为发送坐标的z值。
Info:
机器人发送2D数据至视觉
Return type:
Void
Pseudo-code:
def send_robot_data_2d(plane, optional_z = False, z_value = 0): sync() base_in_plane = pose_inv(plane) tool_in_plane = pose_trans(base_in_plane,get_actual_tcp_pose()) p_actual_pose = tool_in_plane enter_critical socket_send_int(floor(mult*p_actual_pose[0]), daoai_socket_name) socket_send_int(floor(mult*p_actual_pose[1]), daoai_socket_name) if optional_z: socket_send_int(floor(mult*z_value), daoai_socket_name) else: socket_send_int(floor(mult*p_actual_pose[2]), daoai_socket_name) end socket_send_int(floor(mult*p_actual_pose[3]), daoai_socket_name) socket_send_int(floor(mult*p_actual_pose[4]), daoai_socket_name) socket_send_int(floor(mult*p_actual_pose[5]), daoai_socket_name) socket_send_int(floor(mult*0.0), daoai_socket_name) socket_send_int(daoai_r_command, daoai_socket_name) socket_send_int(daoai_payload_1, daoai_socket_name) socket_send_int(daoai_payload_2, daoai_socket_name) socket_send_int(DAOAI_ROBOT_TYPE, daoai_socket_name) socket_send_int(DAOAI_META_VERSION, daoai_socket_name) daoai_r_command = RC_DAOAI_NO_COMMAND exit_critical sync() end
recv_daoai_data_2d(plane)
Parameters:
plane: 机器人接受时会将收到的2D位置 从该平面转换到3D坐标然后接收。
Info:
机器人从视觉接受2D数据
Return type:
Void
Pseudo-code:
def recv_daoai_data_2d(plane): wait_for_data = True while wait_for_data == True: daoai_data = socket_read_binary_integer(16, daoai_socket_name) if daoai_data[0] == 16: wait_for_data = False end sync() end if daoai_data[15] != DAOAI_ROBOT_TYPE: popup("Pick-it is not configured to communicate with a UR robot.") end if daoai_data[16] != DAOAI_META_VERSION: popup("The DaoAI interface version does not match the version of this program.") end tool_in_plane=p[daoai_data[1]/mult,daoai_data[2]/mult,daoai_data[3]/mult,daoai_data[4]/mult,daoai_data[5]/mult,daoai_data[6]/mult] bp = pose_trans(plane, tool_in_plane) cur_pose = get_actual_tcp_pose() #bp=tool_in_plane daoai_data[1]=bp[0] daoai_data[2]=bp[1] daoai_data[3]=bp[2] daoai_data[4]=bp[3] daoai_data[5]=bp[4] daoai_data[6]=bp[5] enter_critical # daoai_data[14] contains the status of the response daoai_tcp_pose = bp daoai_payload_1=daoai_data[8]/mult daoai_payload_2=daoai_data[9]/mult daoai_payload_3=daoai_data[10]/mult daoai_payload_4=daoai_data[11]/mult daoai_payload_5=daoai_data[12]/mult daoai_payload_6 = daoai_data[13]/mult daoai_status = daoai_data[14] daoai_tcp_pose[2] = cur_pose[2] exit_critical sync() end
Calibration/校准函数
Manual Calibration:
daoai_start_manual_calibration()
Parameters:
N/A
Info:
机器人使用此函数引导视觉系统开始手动校准流程。
Return type:
Boolean(布尔值):成功启动校准程序后返回True。
Pseudo-code:
def daoai_start_manual_calibration(): #Set command as "Start Manual Calibration" daoai_r_command = RC_START_MANUAL_CALIBRATION send_robot_data() recv_daoai_data() if (daoai_status != DAOAI_MODE_CALIBRATION): #check rsponse from Vision, if incorrect, terminate the process return False end return True end
daoai_manual_accumulate_calibration()
Parameters:
N/A
Info:
机器人使用此函数累计校准位姿。
Return type:
Boolean(布尔值):成功累计校准数据后返回True。当校准流程结束时、累计失败时返回False。
Pseudo-code:
def daoai_manual_accumulate_calibration(): #Set command as "Accumulate Calibration poses" daoai_r_command = RC_MANUAL_ACCUMULATE_POSE send_robot_data() recv_daoai_data() if (daoai_status != DAOAI_MODE_CALIBRATION): #check response from Vision, if incorrect, terminate the process return False end if (daoai_status == DAOAI_DONE_CALIBRATION): #check rsponse from Vision, Vision sends "end" command, terminate the process return False end return True end
daoai_stop_manual_calibration()
Parameters:
N/A
Info:
机器人使用此函数示意视觉系统停止校准。
Return type:
Boolean(布尔值):成功发送停止信息给视觉系统后返回True。
Pseudo-code:
def daoai_stop_manual_calibration(): daoai_r_command = RC_STOP_MANUAL_CALIBRATION send_robot_data() popup("DaoAI Done Calibration.", title = "WARNING", warning = True, blocking = False) return True end
Guidance Calibration:
daoai_guidance_accumulate_calibration()
Parameters:
N/A
Info:
机器人使用此函数与视觉系统进行引导校准流程。每次收集位姿需要运行一次。
Return type:
Boolean(布尔值):返回True。不需要视觉回应任何消息。
Pseudo-code:
def daoai_guidance_accumulate_calibration(): daoai_r_command = RC_GUIDANCE_CALIBRATION send_robot_data() return True end
Auto Calibration:
daoai_start_auto_calibration()
Parameters:
N/A
Info:
机器人使用此函数请求视觉系统进行拍照和计算。
Return type:
Boolean(布尔值):成功启动自动校准程序后返回True。
Pseudo-code:
def daoai_start_auto_calibration(): daoai_r_command = RC_START_AUTO_CALIBRATION send_robot_data() recv_daoai_data() if (daoai_status != DAOAI_MODE_AUTO_CALIBRATION): #Not in Auto calibration process, terminate return False end return True end
daoai_auto_accumulate()
Parameters:
N/A
Info:
机器人使用此函数与视觉系统进行引导校准流程。每次收集位姿需要运行一次。
Return type:
Boolean(布尔值):返回True。不需要视觉回应任何消息。
Pseudo-code:
def daoai_auto_accumulate(): daoai_r_command = RC_AUTO_ACCUMULATE_POSE send_robot_data() recv_daoai_data() if (daoai_status == DAOAI_DONE_CALIBRATION): #auto calibration done return False end return True end
2D Auto Calibration:
Parameters:
N/A
Info:
机器人使用此函数请求视觉系统开始2D自动校准。
Return type:
Boolean(布尔值):成功启动自动校准程序后返回True。
Pseudo-code:
def daoai_start_auto_calibration_2d(): daoai_r_command = RC_START_2D_AUTO_CALIBRATION send_robot_data_2d(daoai_plane) recv_daoai_data_2d(daoai_plane) #wait the response that the vision started if (daoai_status != DAOAI_MODE_2D_AUTO_CALIBRATION): popup("DaoAI Cannot Start Auto 2d Calibration.", title="WARNING", warning=True, blocking=True) return False end return True end
Parameters:
N/A
Info:
机器人使用此函数请求视觉系统进行2D自动校准的位姿累积。每次收集位姿需要运行一次。
Return type:
Boolean(布尔值):返回True。不需要视觉回应任何消息。
Pseudo-code:
def daoai_auto_accumulate_2d(): daoai_r_command = RC_AUTO_ACCUMULATE_2D_POSE send_robot_data_2d(daoai_plane) recv_daoai_data_2d(daoai_plane) if (daoai_status == DAOAI_DONE_2D_AUTO_CALIBRATION): #finish auto calibration popup("DaoAI Done Calibration.", title= "WARNING", warning= True,blocking=True) return False end return True end
Teach Pose
Parameters:
N/A
Info:
机器人使用此函数发送当前位姿进行物体抓取示教。
Return type:
Void
Pseudo-code:
def daoai_teach_pose(): daoai_r_command = RC_SEND_POSE send_robot_data() end
Parameters:
N/A
Info:
机器人使用此函数发送当前位姿进行2D流程的物体抓取示教。
Return type:
Void
Pseudo-code:
def daoai_teach_pose_2d(): daoai_r_command = RC_DAOAI_CAPTURE_AND_PROCESS send_robot_data_2d(daoai_plane) end
3D Camera Capture
daoai_capture_and_process_async()
Parameters:
N/A
Info:
机器人使用此函数请求视觉拍照并检测, 该函数不会阻塞机器人脚本,视觉会立即回复并执行拍照和检测。
Return type:
Boolean(布尔值):请求拍照和物体检测后,视觉认知系统成功开始后返回true。
def daoai_capture_and_process_async(): daoai_r_command = RC_DAOAI_CAPTURE_AND_PROCESS_ASYNC daoai_payload_1 = task_id #specify the vision task id send_robot_data() recv_daoai_data() #wait the response that the vision started if (daoai_status == DAOAI_CAPTURE_SUCCESS): return True end popup("DaoAI Image Capture Failed.", title="WARNING", warning=True, blocking=True) return False end
daoai_capture_and_process()
Parameters:
N/A
Info:
机器人使用此函数请求视觉拍照并检测。在拍照期间脚本运行会被阻塞,拍照后继续。
Return type:
Boolean(布尔值):请求拍照和物体检测后,视觉认知系统成功开始后返回true。
Pseudo-code:
def daoai_capture_and_process(): daoai_r_command = RC_DAOAI_CAPTURE_AND_PROCESS daoai_payload_1 = daoai_task_id #specify the vision task id send_robot_data() recv_daoai_data() #wait the response that the vision started if (daoai_status == DAOAI_CAPTURE_SUCCESS): return True end popup("DaoAI Image Capture Failed.", title="WARNING", warning=True, blocking=True) return False end
2D Camera Capture
daoai_capture_and_process_2d_async()
Parameters:
N/A
Info:
机器人使用此函数请求视觉进行2D流程的拍照并检测, 该函数不会阻塞机器人脚本,视觉会立即回复并执行拍照和检测。
Return type:
Boolean(布尔值):请求拍照和物体检测后,视觉认知系统成功开始后返回true。
def daoai_capture_and_process_2d_async(): daoai_r_command = RC_DAOAI_CAPTURE_AND_PROCESS_ASYNC daoai_payload_1 = daoai_task_id #specify the task id for which task to perform send_robot_data_2d(daoai_plane) recv_daoai_data_2d(daoai_plane) #wait the response that the vision started if (daoai_status == DAOAI_CAPTURE_SUCCESS): return True end popup("DaoAI Image Capture Failed.", title="WARNING", warning=True, blocking=True) return False end
daoai_capture_and_process_2d()
Parameters:
N/A
Info:
机器人使用此函数请求视觉进行2D流程的拍照并检测。在拍照期间脚本运行会被阻塞,拍照后继续。
Return type:
Boolean(布尔值):请求拍照和物体检测后,视觉认知系统成功开始后返回true。
Pseudo-code:
def daoai_capture_and_process_2d(): daoai_r_command = RC_DAOAI_CAPTURE_AND_PROCESS daoai_payload_1 = daoai_task_id send_robot_data_2d(daoai_plane) recv_daoai_data_2d(daoai_plane) #wait the response that the vision started if (daoai_status == DAOAI_CAPTURE_SUCCESS): return True end popup("DaoAI Image Capture Failed.", title="WARNING", warning=True, blocking=True) return False end
3D Pick
daoai_get_picking_pose()
Parameters:
N/A
Info:
机器人使用此函数请求视觉发送抓取位姿。机器人会等待直到视觉认知系统完成物体检测。该函数通常是运行daoai_capture_and_process() 之后使用。每次运行会返回一个抓取位姿。
调用该函数后收到的视觉回复,payload_1 为物体剩余数量(包括当前);payload_2 为物体标签码,用于区分物体种类。
Return type:
Boolean(布尔值):成功检测到至少一个物体 并获取抓取位姿后返回True。
Pseudo-code:
def daoai_get_picking_pose(): daoai_r_command = RC_DAOAI_PICK_POSE daoai_payload_1 = daoai_task_id #specify the task id for which vision will perform send_robot_data() recv_daoai_data() daoai_num_remaining_objects = daoai_payload_1 if (daoai_status == DAOAI_NO_OBJECT_FOUND): #No objects found, Failed to find pick position, terminate popup("NO OBJECTS FOUND.", title="WARNING", warning=True, blocking=True) return False end if (daoai_status == DAOAI_NO_COLLISION_FREE_POSE): #No collision free path of pick pose, terminate popup("NO Collision-free PICK pose.", title="WARNING", warning=True, blocking=True) return False end if(daoai_payload_1 <= 0): #Not enough occurence of objects in scene popup("NO OBJECTS FOUND.", title="WARNING", warning=True, blocking=True) return False end #setup pick pose pick_pose = daoai_tcp_pose return True end
2D Pick
daoai_get_picking_pose_2d()
Parameters:
N/A
Info:
机器人使用此函数请求视觉发送抓取位姿。脚本会阻塞直到视觉认知系统完成物体检测。该函数通常是运行daoai_capture_and_process_2d() 之后使用。每次运行会返回一个抓取位姿。
调用该函数后收到的视觉回复,payload_1 为物体剩余数量(包括当前);payload_2 为 物体标签码,用于区分物体种类。
Return type:
Boolean(布尔值):成功检测到至少一个物体 并获取抓取位姿后返回True。
Pseudo-code:
def daoai_get_picking_pose_2d(): daoai_r_command = RC_DAOAI_PICK_POSE daoai_payload_1 = daoai_task_id send_robot_data_2d(daoai_plane) recv_daoai_data_2d(daoai_plane) #wait the response that the vision started daoai_num_remaining_objects = daoai_payload_1 daoai_object_type_id = daoai_payload_2 if (daoai_status == DAOAI_NO_OBJECT_FOUND): #Failed to find pick position popup("No object found or detected.", title="WARNING", warning=True, blocking=True) return False end if (daoai_status == DAOAI_NO_COLLISION_FREE_POSE): #No collision free path of pick pose popup("NO Collision-free PICK pose.", title="WARNING", warning=True, blocking=True) return False end if(daoai_payload_1 <= 0): return False end pick_pose = daoai_tcp_pose return True end
switch camera config
daoai_cam_config(id)
Parameters:
int: id 代表了在机器人视觉认知系统的任务检测的高级参数中,设置的相机配置id
Info:
机器人使用此函数请求视觉切换相机配置。使用该函数前,需要首先在机器人视觉认知系统对应的任务中启用自适应相机配置,选择并配置 根据机器人命令加载配置,配置了相应的相机配置后,才可以调用并进行切换。
Return type:
Boolean(布尔值):成功检测到至少一个物体 并获取放置位姿后返回True。
Pseudo-code:
- def daoai_cam_config(id):
payload_1 = id daoai_r_command = RC_SWITCH_CONFIG send_robot_data() recv_daoai_data() #wait the response that the vision started if (daoai_status == DAOAI_SWITCH_CONFIG_SUCCESS): return True end if (daoai_status == DAOAI_SWITCH_CONFIG_FAIL): #Failed to switch config popup("DaoAI switch camera config failed, please check your configs.", title="WARNING", warning=True, blocking=True) end return False
end
Helper
daoai_check_box_empty()
Parameters:
N/A
Info:
机器人使用此函数查看箱体是否为空,需要先运行daoai_switch_task()来选择检查的task。
当 ROI区域内的点云 < 2000 和 检测流程没有检测到物体 则判断箱体为空。
Return type:
Bool(布尔值):返回箱体是否为空。
Pseudo-code:
def daoai_check_box_empty(): daoai_r_command = RC_CHEKC_EMPTY_BOX daoai_payload_1 = daoai_task_id #specify the task id for which vision will perform send_robot_data() recv_daoai_data() if (daoai_status == DAOAI_BOX_NOT_EMPTY): #ROI not empty return False end if (daoai_status == DAOAI_BOX_EMPTY): #ROI empty popup("Box Empty.", title="WARNING", warning=True, blocking=True) return True end return False end
daoai_remaining_objects()
Parameters:
N/A
Info:
机器人使用此函数查看剩余的可抓取物体数量,需要先运行daoai_capture_and_process() 和 daoai_get_picking_pose()。
Return type:
Int(整数值):返回剩余的抓取点位的数量。
Pseudo-code:
def daoai_remaining_objects(): return daoai_num_remaining_objects end
daoai_switch_task(id)
Parameters:
Int(整数值):需要切换到的task id
Info:
机器人使用此函数切换task id,之后的capture_and_process()和daoai_get_picking_pose() 都会对应vision的task id。程序开始时,默认的task_id 为0。
Return type:
Void:无返回值
Pseudo-code:
def daoai_switch_job(id): daoai_task_id = id end
daoai_object_type()
Parameters:
N/A
Info:
机器人使用此函数查看当前物体的类型,也就是该物体在深度学习模型里的标签号,需要先运行daoai_capture_and_process() 和 daoai_get_picking_pose()。
Return type:
Int(整数值):返回当前物体的类型。
Pseudo-code:
def daoai_object_type(): return daoai_object_type_id end
daoai_precision_check()
Parameters:
N/A
Info:
需要首先在项目中设置一个precision quick check的任务。
机器人使用此函数请求视觉执行快速精度验证,需要先运行daoai_switch_task()来指定运行的task id。
Return type:
Boolean(布尔值):成功检测到快速精度验证图形码并计算出误差后返回True
Pseudo-code:
def daoai_precision_check(): daoai_r_command = RC_PRECISION_CHECK daoai_payload_1 = daoai_task_id send_robot_data() recv_daoai_data() if (daoai_status == DAOAI_PRECISION_CHECK_FAIL): popup("DaoAI drift check failed, please make sure the sticker is visible and has not moved since initial define.") return False end if (daoai_status == DAOAI_PRECISION_CHECK_SUCCESS): #3d_error = daoai_payload_1 msg = str_cat("3D error is : ", daoai_payload_1) msg = str_cat(msg, "mm") popup(msg, title ="Precision Check Success", warning = True, blocking = False) return True end return False end
消息元数据/Message metadata
为保证机器人和视觉认知系统之间对数据的正确解读,以下元数据始终与请求和回应消息一起发送:
字段 |
值/描述 |
meta_1 |
|
meta_2 |
meta_2,即最后一个字段,代表机器人的版本和视觉认知系统之间的协议版本号. 目前的版本号 = 2 |
通信流程示例
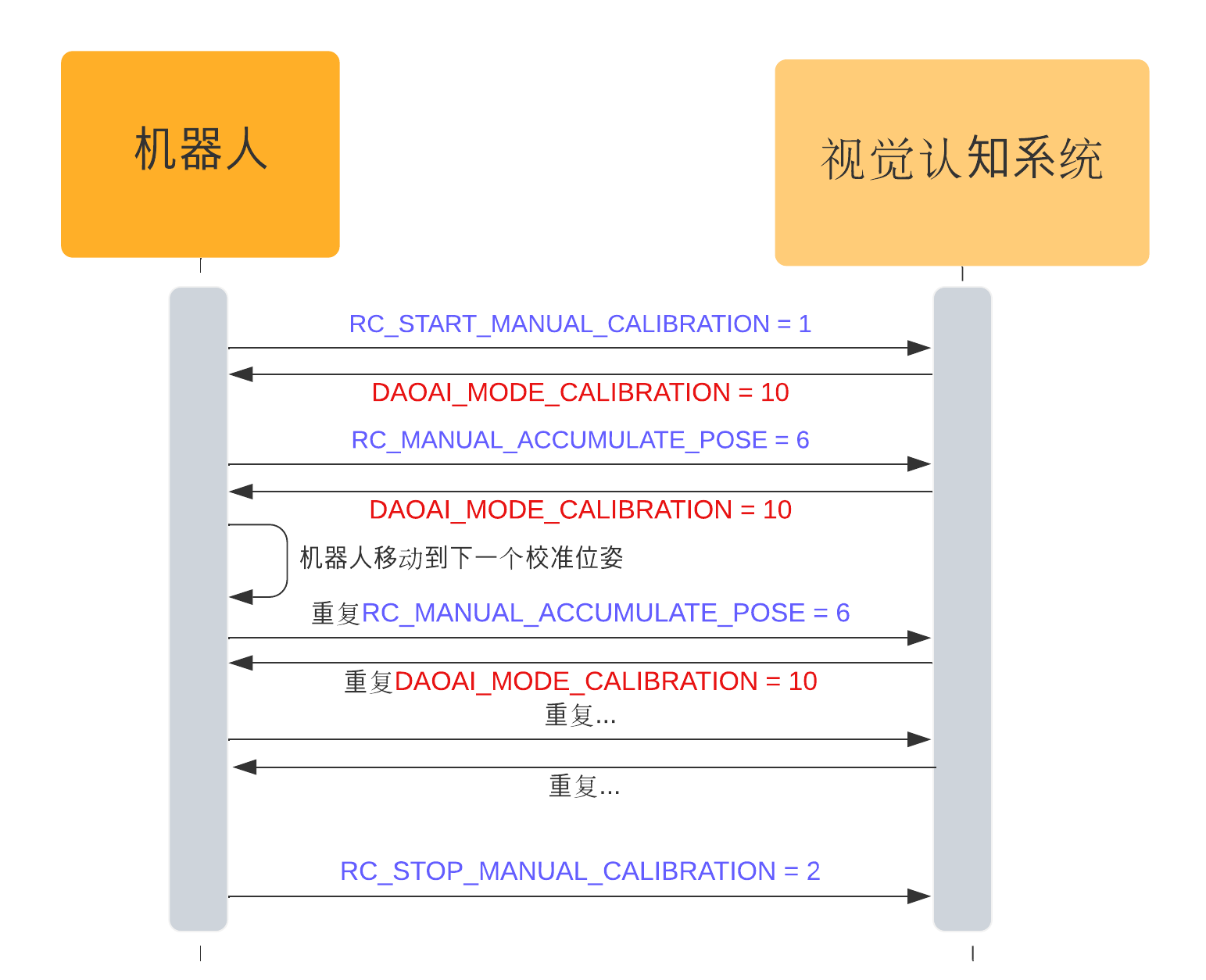
手动校准通信示例
设置好机器人脚本中所有的校准位姿。
机器人使用 RC_START_MANUAL_CALIBRATION 发送开始校准指令到视觉认知系统。
视觉回复 DAOAI_MODE_CALIBRATION 确认正处于手动校准模式。
机器人使用 RC_MANUAL_ACCUMULATE_POSE 指令让视觉认知系统进入累计流程。视觉进行储存并回复 DAOAI_MODE_CALIBRATION 让机器人继续进行下一个位姿移动。
在累计流程结束时机器人发送 RC_STOP_MANUAL_CALIBRATION 表示已结束校准流程。
#Robot Program
Popup("Start Manual Calibration")
If daoai_start_manual_calibration()
MoveJ
# Waypoints should be setup before running the script
Waypoint_1
#Wait 2 seconds in order to minimize the vabration of the
# calibration board after each movements
Wait: 2.0
#Accumulate the pose
daoai_manual_accumulate_calibration()
#Repeats
......
MoveJ
Waypoint_9
Wait: 2.0
daoai_manual_accumulate_calibration()
Wait: 2.0
daoai_stop_manual_calibration()
daoai_socket_close()
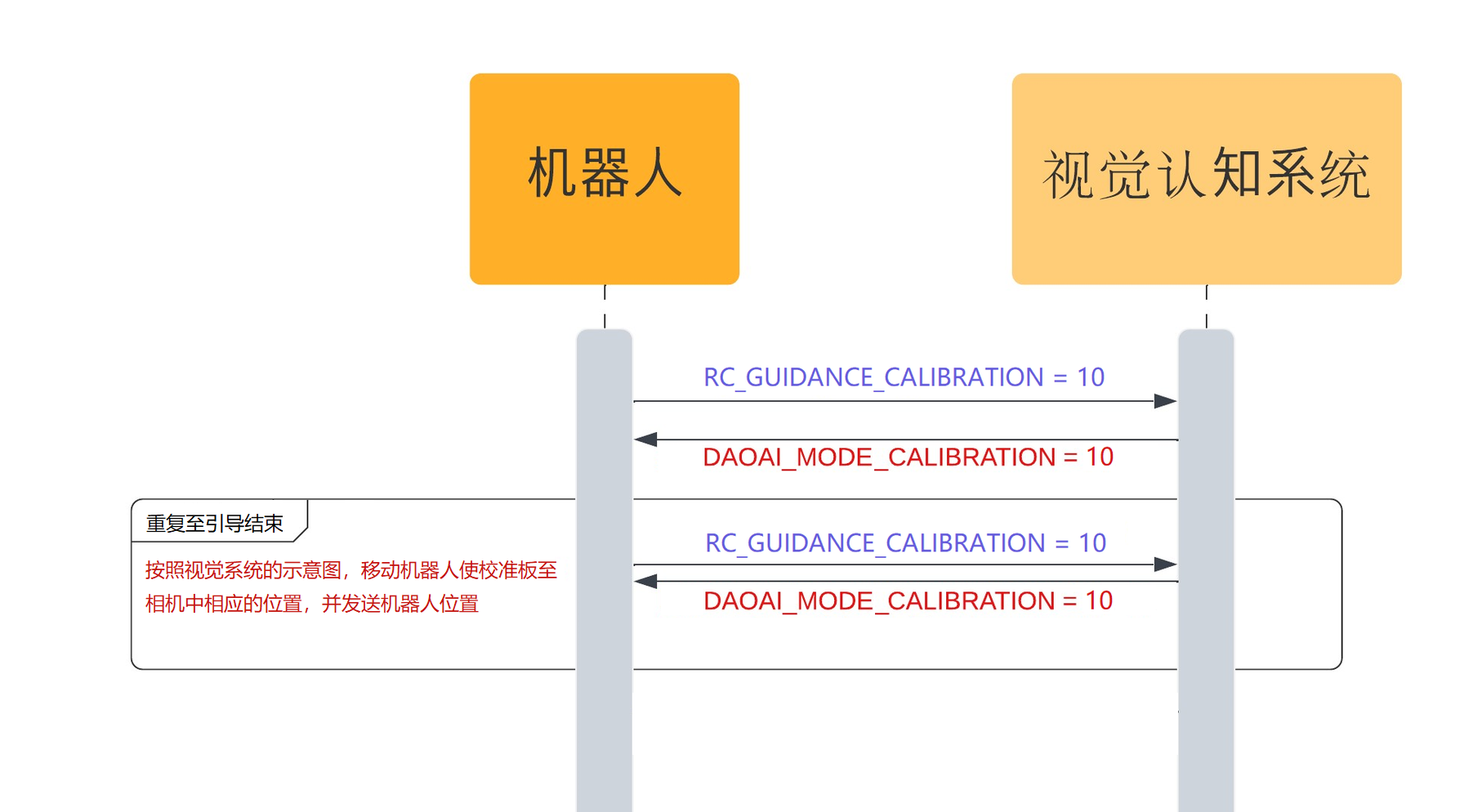
引导校准通信示例
设置好第一个校准位姿。
机器人使用 RC_GUIDANCE_CALIBRATION 发送开始引导校准指令到视觉认知系统。
视觉会进行拍摄并计算出下一个位姿,而且会对当前位姿作出提议,用户需根据视觉的提示移动机器人到更理想的位姿:
视觉判定当前校准位姿的成相是优良的,视觉会回复 DAOAI_GUIDANCE_CALIBRATION_GOOD 给机器人,并显示下一个推荐的位姿,用户需移动到推荐位姿;
视觉判定当前校准位姿的成相是较差的,视觉会回复 DAOAI_GUIDANCE_CALIBRATION_BAD 给机器人,并显示该如何改进当前位姿,重新移动并采集和计算;
重复步骤2-3直到视觉收集到足够的校准位姿。
在累计流程结束时视觉向机器人发送 DAOAI_DONE_GUIDANCE_CALIBRATION 使机器人结束校准流程。
Robot Program
MoveJ
Waypoint_1
daoai_guidance_accumulate_calibration()
daoai_socket_close()
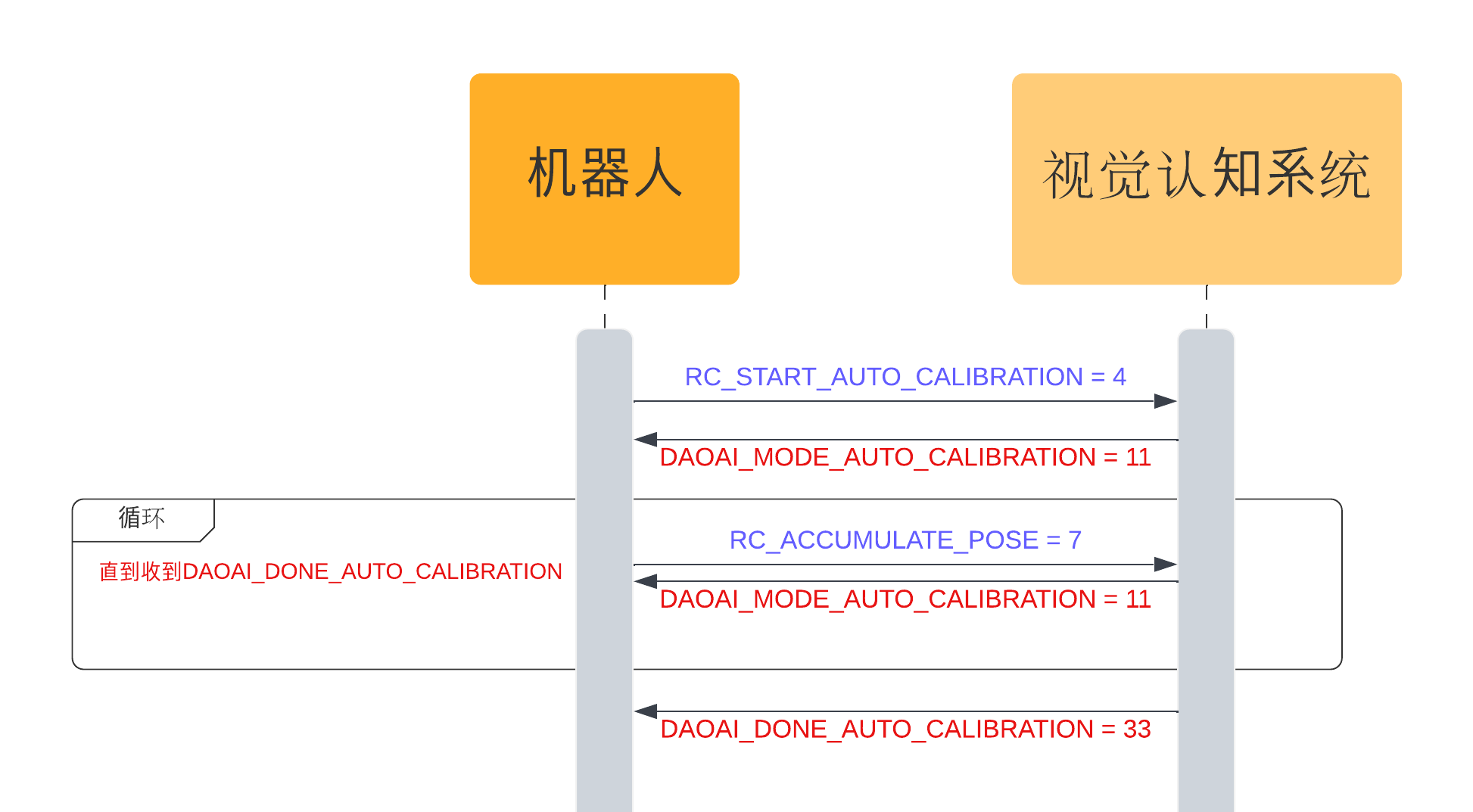
自动校准通信示例
设置好第一个校准位姿。
机器人使用 RC_START_AUTO_CALIBRATION 发送开始自动校准指令到视觉认知系统,并发送当前机器人位姿。
在确认视觉认知系统处于正确的流程后,回复机器人 DAOAI_MODE_AUTO_CALIBRATION 进入采集图像和累计流程。
机器人使用 RC_ACCUMULATE_POSE 指令让视觉认知系统进入累计流程。视觉进行储存计算出下一个校准位姿,并回复 DAOAI_MODE_AUTO_CALIBRATION 移动机器人到下一个位姿。
在累计流程结束时视觉向机器人发送 DAOAI_DONE_AUTO_CALIBRATION 使机器人结束校准流程。
Robot Program
Popup("Start Auto Calibration"")
MoveJ
center_pose
If daoai_start_auto_calibration()
Loop daoai_auto_accumulate_calibration()
calibra_pose≔daoai_tcp_pose
MoveL
calibra_pose
Wait: 1.0
Wait: 2.0
daoai_socket_close()
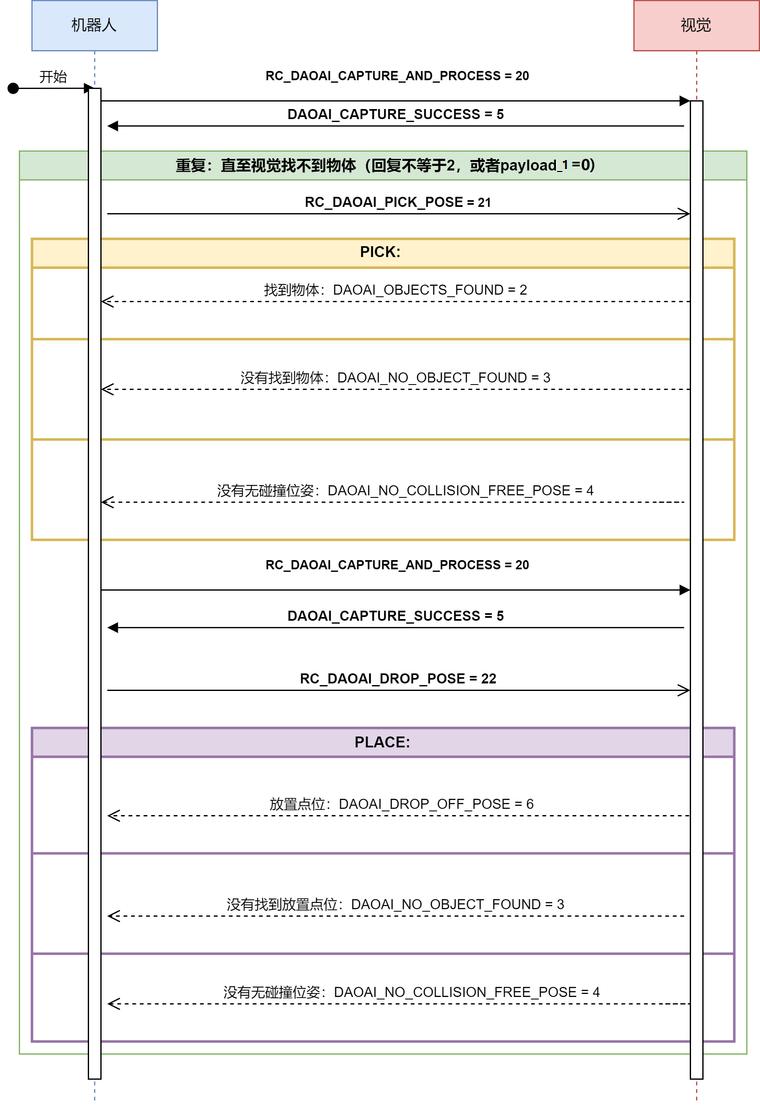
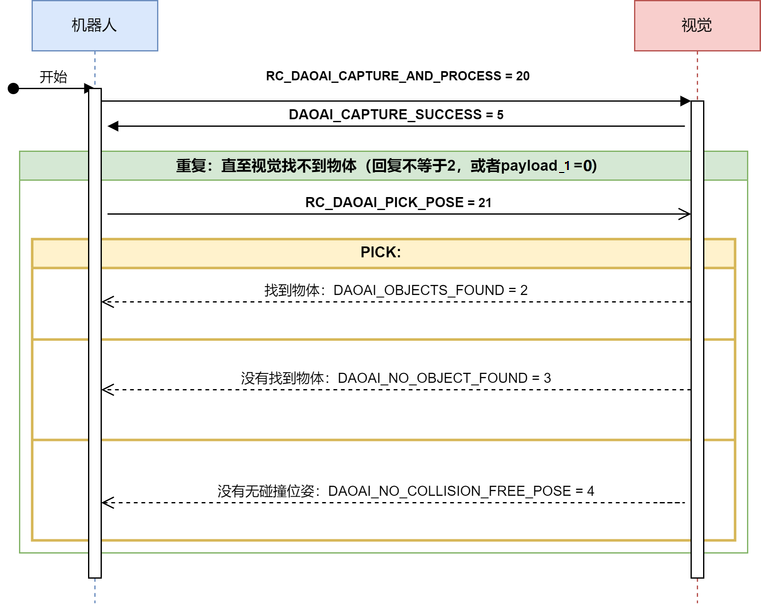
抓取通信示例
设置好探测位姿,此位姿是抓取结束后机器人移动到的位姿,该位姿不能阻挡摄像头。
机器人使用 RC_DAOAI_CAPTURE_AND_PROCESS 请求拍照并识别物体。
视觉认知系统拍照成功后回复DAOAI_CAPTURE_SUCCESS,表示视觉处于拍摄探测阶段;
机器人发送 RC_DAOAI_PICK_POSE 请求视觉发送抓取位姿;
视觉认知系统回复三种以下的可能性:DAOAI_OBJECTS_FOUND ;DAOAI_NO_OBJECT_FOUND ; DAOAI_NO_COLLISION_FREE_POSE 。
相机拍摄成功并且视觉成功探测到一个或多个物体时,视觉发送 DAOAI_OBJECTS_FOUND = 2 和抓取位姿。payload_1数值为剩余的需抓取物体数量,此payload会根据每次抓取结束后更新;
相机拍摄成功,视觉探测不成功或者场景中没有物体时,视觉发送 DAOAI_NO_OBJECT_FOUND = 3;
没有安全抓取位姿时,视觉发送 DAOAI_NO_COLLISION_FREE_POSE = 4;
视觉认知系统回复的payload_1 代表物体剩余数量(包括当前发送的物体); payload_2 代表物体在深度学习中的标签码,用于区分物体种类。
场景内的物体抓取完成时,视觉会在最后一个需要抓取的物体信息中,payload_1 = 1,以此告知机器人剩余一个物体抓取,结束后将需要重新拍照。这时如果再调用daoai_get_picking_pose()则返回的payload_1 就会为0,代表没有可抓取的物体。
Robot Program
Loop
If daoai_capture_and_process()
Loop daoai_get_picking_pose()
MoveL
detection_pose
MoveL
pick_pose
Wait: 5.0
MoveL
detection_pose
daoai_socket_close()
抓取并请求放置通信示例
抓取部分和纯抓取一样,区别在于放置:抓取并请求放置流程中,放置的点位是机器人请求视觉计算并发送的。
抓取结束后,机器人再次请求 RC_DAOAI_CAPTURE_AND_PROCESS 拍照并识别放置点位。
视觉认知系统回复DAOAI_CAPTURE_SUCCESS,表示视觉处于拍摄探测阶段;
机器人发送 DAOAI_DROP_OFF_POSE 请求视觉发送放置位姿;
视觉认知系统回复三种以下的可能性:DAOAI_DROP_OFF_POSE ;DAOAI_NO_OBJECT_FOUND ; DAOAI_NO_COLLISION_FREE_POSE 。
相机拍摄成功并且视觉成功探测放置点位时,视觉发送 DAOAI_DROP_OFF_POSE = 6 和抓取位姿。payload_1数值为剩余的需抓取物体数量,此payload会根据每次抓取结束后更新;
相机拍摄成功,视觉探测不成功或者场景中放置点位时,视觉发送 DAOAI_NO_OBJECT_FOUND = 3,此处虽然使用同样的状态,但 DAOAI_NO_OBJECT_FOUND 状态意思为:无放置点位;
没有安全抓取位姿时,视觉发送 DAOAI_NO_COLLISION_FREE_POSE = 4;
Robot Program
Loop
If daoai_capture_and_process()
Loop daoai_get_picking_pose()
MoveJ
detection_pose
MoveJ
pick_pose
Wait: 5.0
MoveJ
detection_pose
If daoai_capture_and_process()
If daoai_get_placing_pose()
MoveJ
pick_pose
Wait: 5.0
MoveJ
detection_pose
daoai_socket_close()