空箱检测功能
本章会详细介绍如何设置 空箱检测 (Empty Box Check) 功能。
Empty Box Check 是一种查看ROI中是否存在物体的方法,主要用于保护场景材料、设备和人身安全的重要判断条件。自动化场景中,系统会根据大量条件判断状态机、流程的变化。 当场景中仍然存在物体、工件、障碍物,系统却无法获得该信号时,可能会导致机械设备、零件或者人身安全。
Empty Box Check 功能存在于所有的检测流程,不管你是使用任意的检测流程,都可以使用此功能。
1. 重新设置ROI
使用Empty Box Check功能,你有可能需要重新设置你的ROI。通常情况下,在设置ROI时都会把物体的背景涵括在内,就像下图显示一样(下图的桌面)。不过,当你想要使用Empty Box Check 功能时,你需要把背景分割开。
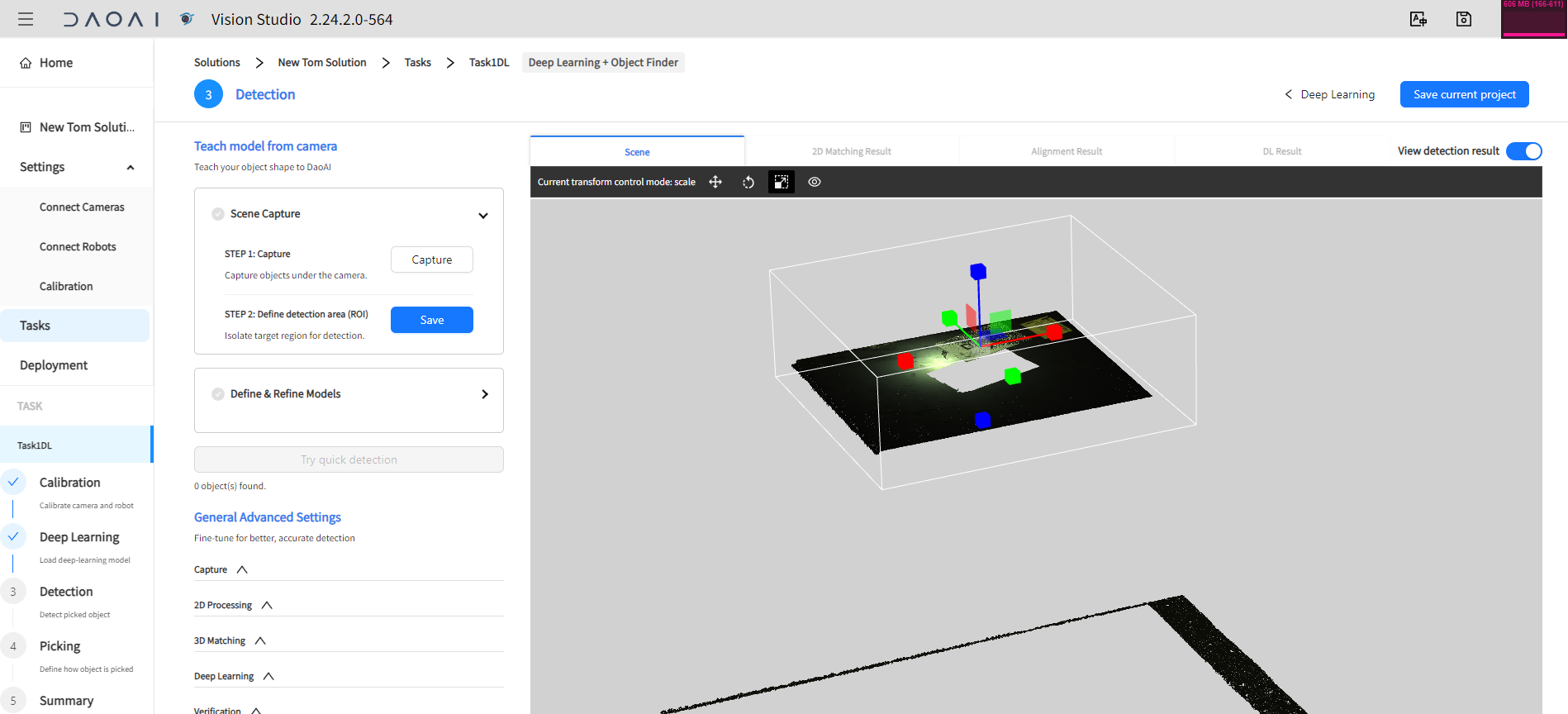
这样做的原因是由于Empty Box Check 功能的原理:此功能是判断ROI中是否存在连续的有效点云,若ROI中有存在超过2000个连续点云的区域,系统则会判断场景中存在物体:Not Empty Box。 反之,当场景中没有存在超过2000个连续点云的区域,系统则会判断场景中没有存在物体:Empty Box。
所以,你需要把ROI重新设置到背景的上方,要把背景的点云排除在外。如下图显示,设置ROI在背景外。
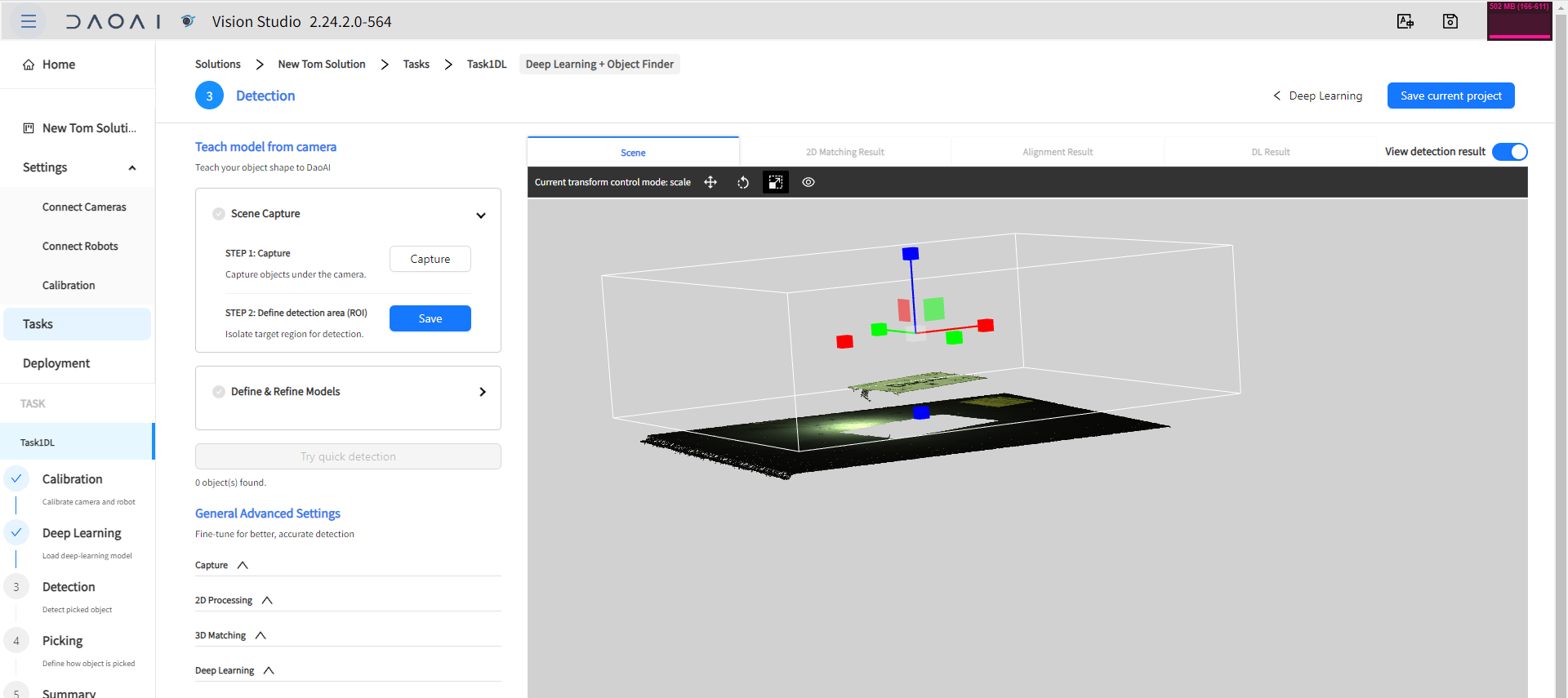
其余的任务选项无需修改。
2. 发送Empty Box Check 检查指令
在deploy后,连接机器人和相机,使用机器人发送Empty Box Check 指令。详情可查阅:RC_CHECK_EMPTY_BOX = 40
发送Empty Box Check 指令,系统会拍照、检测,并在console上显示结果。下图显示,判断结果为Not Empty,ROI中存在连续有效点云。

下图显示,判断结果为 Empty,ROI中没有连续有效点云。

3. 实际案例
在某工厂的自动化流水线上,生产着烟雾探测警报器。机器人会把乱序、随机拜访的烟雾报警器从箱子中取出,放置到自动包装线上。在每个箱子中的工件(烟雾报警器)抓取完毕后,另一机械结构会把空箱子叠到旁边,开始继续抓取下一个箱子。

如上图显示,部分烟雾报警器会竖立在箱子的边缘,导致系统无法识别的烟感器:探测结果为:0个工件。如果此时,机械结构把该箱子叠到旁边,那么就会有工件仍然在箱子中。在后续叠上的箱子则会导致:工件损坏、箱子损坏、机械结构损坏、自动化进程暂停,甚至严重会引起设备、箱子倒塌,引起工作人员的人身安全。
那么,系统无法识别出工件时,我们就需要另一个判断,反馈到系统,告诉系统箱子中仍有物体,请检查、或者人工干预。
Empty Box Check 功能很好的处理了该事宜,发送是否Empty的信号,请求人工干预或者震动,使系统安全地运行。